7. Broken Car¶
7.1. Goal¶
Make a smart traffic system which forces the car to go in another direction when there is a traffic jam in one of the roads.
7.2. Background¶
7.2.1. What is a smart traffic system ?¶
Smart traffic systems are used to prevent traffic jams. When a traffic jam occurs, the other cars are forced to go in another direction such that the normal traffic flow can be maintained.
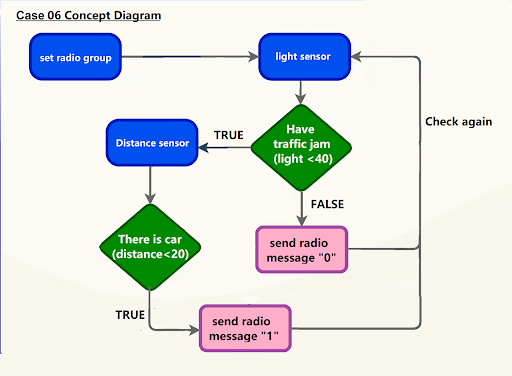
7.2.2. Smart traffic system Operation¶
7.3. Part List¶
Microbit (1)
Expansion board (1)
Light sensor (1)
Distance sensor (1)
Female To Female Dupont Cable Jumper Wire Dupont Line (7)
M3*8mm screw (1)
M2*8mm screw(4)
M3 nut (1)
M2 nut(4)
Screwdriver (1)
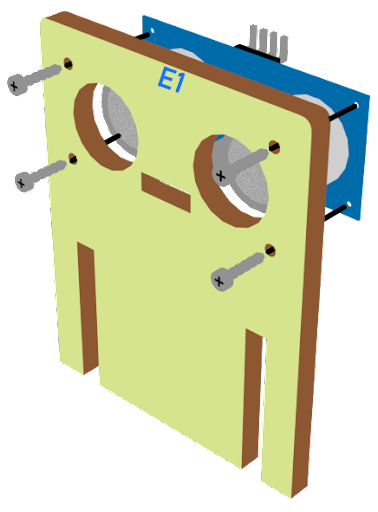
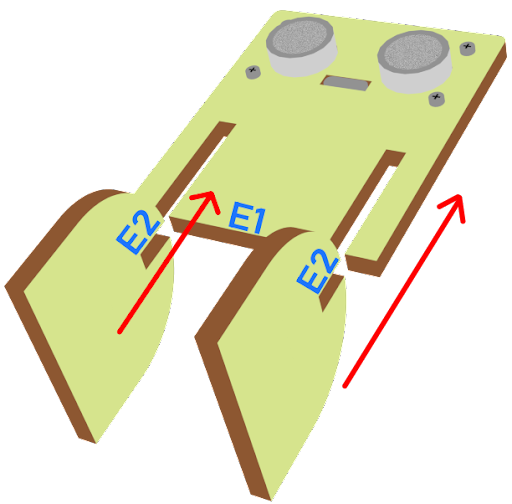
Module E (1)
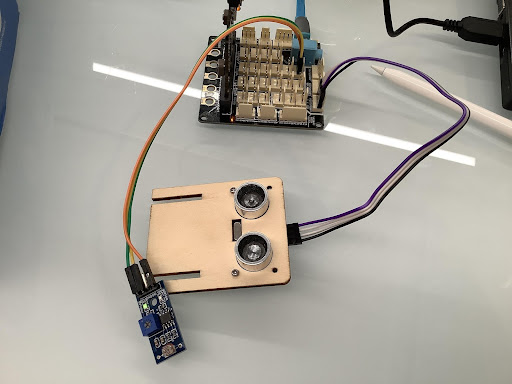
7.4. Assembly step¶
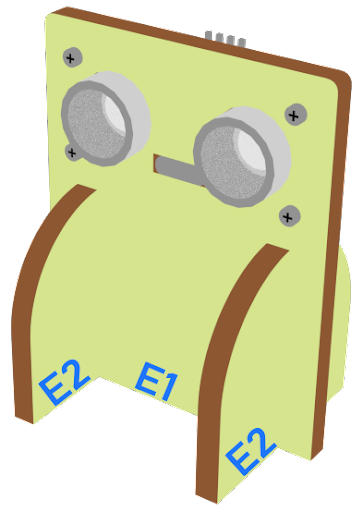
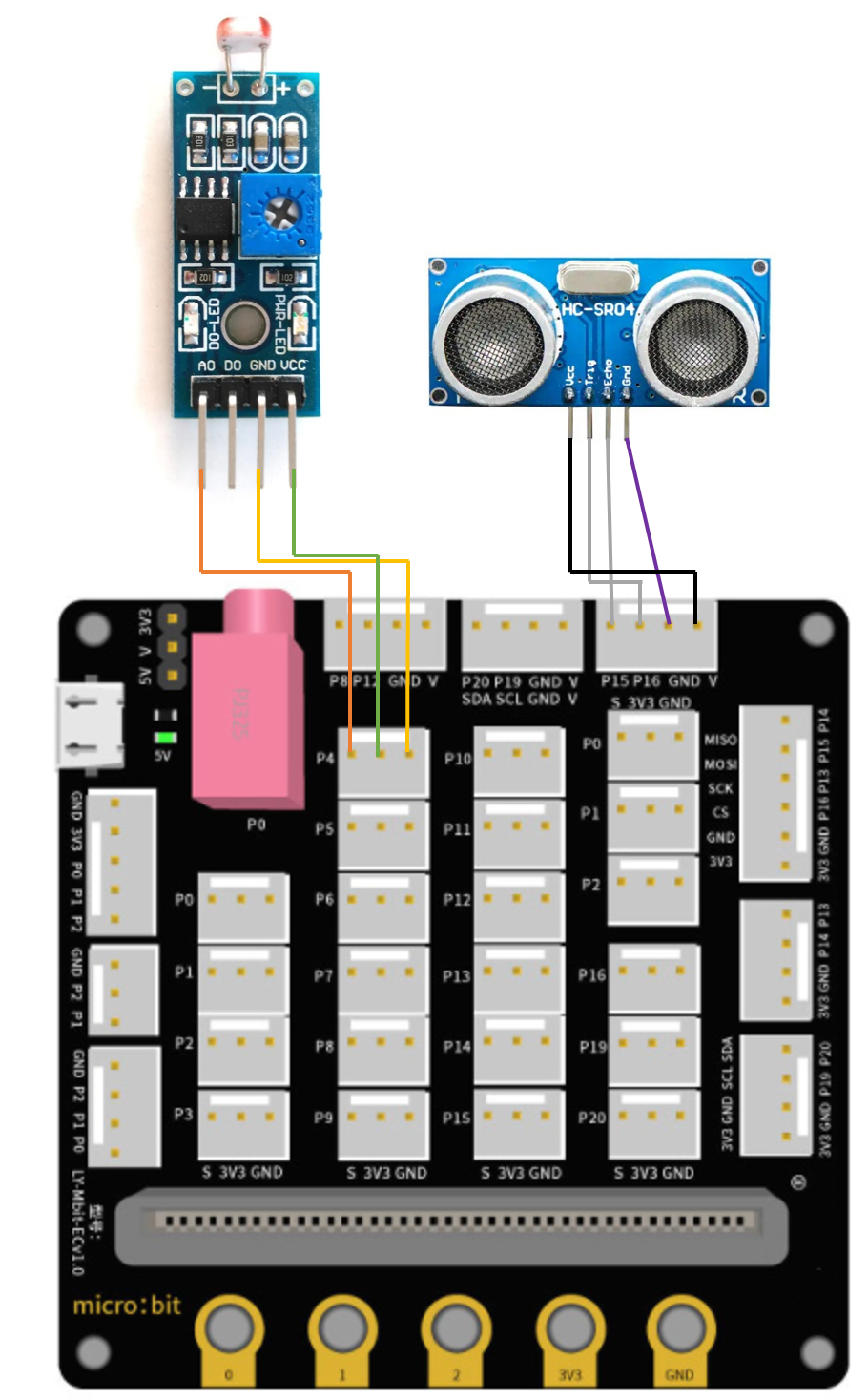
7.5. Hardware connect¶
Micorbit 1:
Connect light sensor to P4 port Connect the Distance Sensor to P15 (trig)/ P16 (echo) port
Microbit 2:
Car
7.6. Programming (MakeCode)¶
7.6.1. Sender:¶
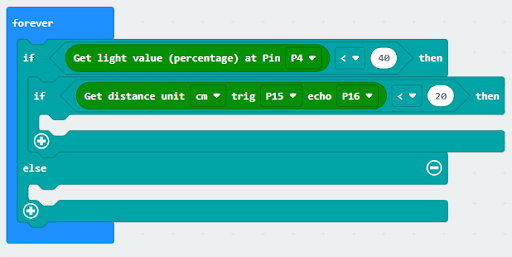
Step 2. Get light and distance value¶
Snap if statement into forever, set get light value (percentage) at pin P4 < 40
If get light value (percentage) at pin P4 < 40, and else if get distance unit cm trig P15 echo 16 < 20
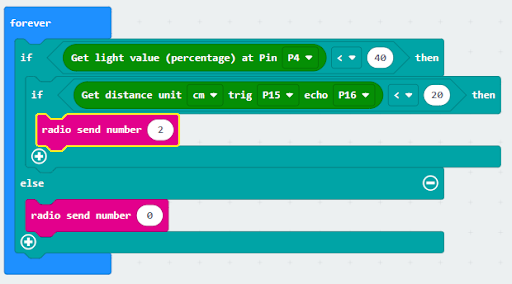
Step 3. Control the car by sending radio number¶
Drag radio send number to 2 into if
Drag radio send number to 0 into else
Full solution:
https://makecode.microbit.org/_PcaMb88sqMuF
7.6.2. Receiver:¶
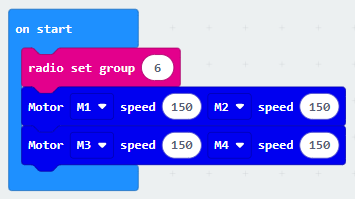
Step 1. Set radio set group at start position¶
Drag radio set group 6 to on start
Initially, the car moves forward by default
Step 2. Control car by receiving different number¶
Snap if statement into on radio received receivedNumber
Set receivedNumber =2 and make the car turn left
Set receivedNumber=0 and make the car move forward

Full solution:
https://makecode.microbit.org/_4hW5yAXg8f5T
https://makecode.microbit.org/_1o1iRhg3qfRF
7.7. Result¶
Distance sensor is used to sense if there are cars passing by. Light sensor is used to detect the broken car. When the light sensor is covered (i.e., when an accident happens), it sends a signal to the passing cars to alert them to change direction so as to maintain normal traffic flow.
7.8. Think¶
Other than turning, how can we control the passing cars to change direction so as to maintain normal traffic flow?