11. Intersection¶
11.1. Goal¶
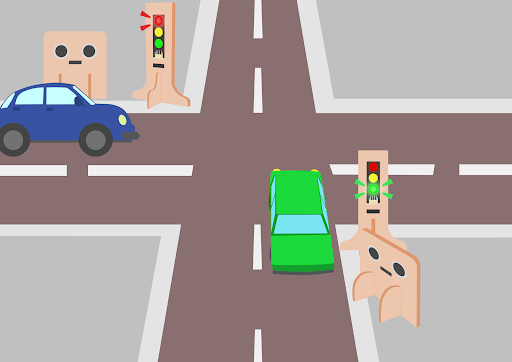
Make a smart traffic light system which automatically switches between red and green lights among different intersection traffic lights according to the road traffic situation.
11.2. Background¶
11.2.1. What is a smart traffic light?¶
Smart traffic light systems are designed to maintain normal operation of the intersection. They automatically switch between red and green lights among different intersection traffic lights according to the road traffic situation.
11.3. Part List¶
Microbit (1)
Expansion board (1)
Distance sensor (2)
Traffic light (2)
4-pin module wire (2)
Female To Female Dupont Cable Jumper Wire Dupont Line (8)
M2*8mm screw (8)
M3*8mm screw (4)
M2 nut (8)
M3 nut (4)
Screwdriver
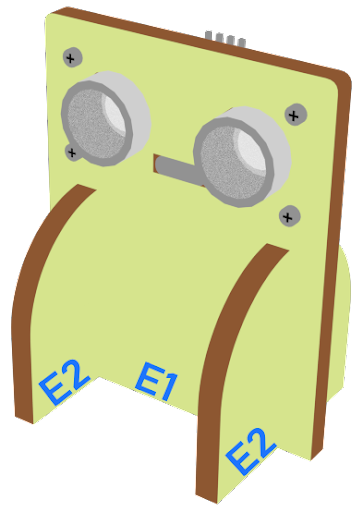
Module E (2)
Module I(2)
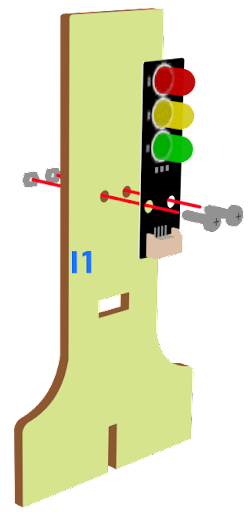
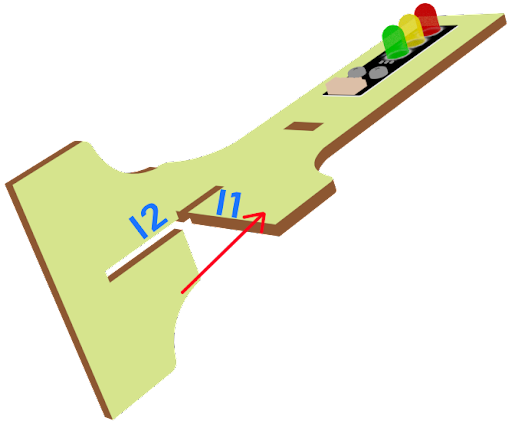
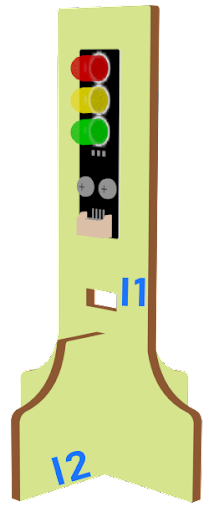
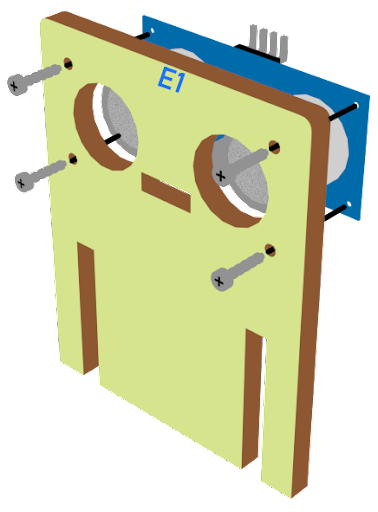
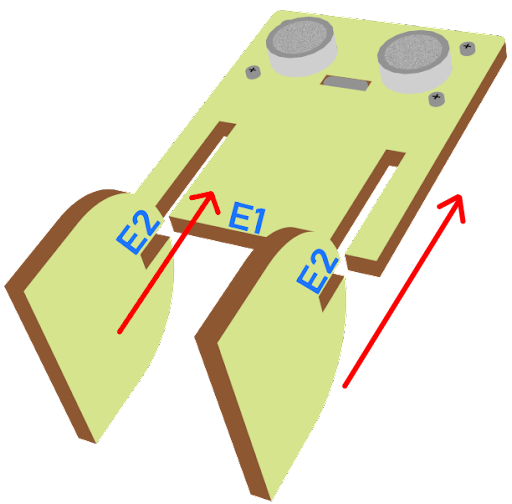
11.4. Assembly step¶
11.5. Hardware connect¶
Microbit 1:
Connect the Traffic light LED Module to P0 P1 P2 port
Connect the Distance Sensor to P15 (trig)/ P16 (echo) port
Microbit2:
Connect the Traffic light LED Module to P0 P1 P2 port
Connect the Distance Sensor to P15 (trig)/ P16 (echo) port
Microbit 3:
Car
Microbit4:
Car
11.6. Programming (MakeCode)¶
11.6.1. Traffic light 1:¶
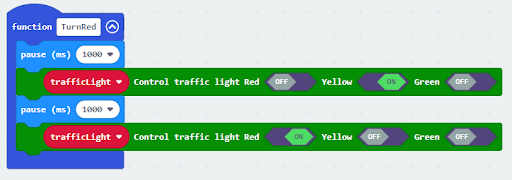
Step 1. Set up a new function (TurnRed)¶
Snap pause to wait 1 second
Control traffic light yellow on
Snap pause to wait 1 second
Control traffic light red on
Step 2. Set up a new function (TurnGreen)¶
Snap pause to wait 1 second
Control traffic light yellow on
Snap pause to wait 1 second
Control traffic light green on

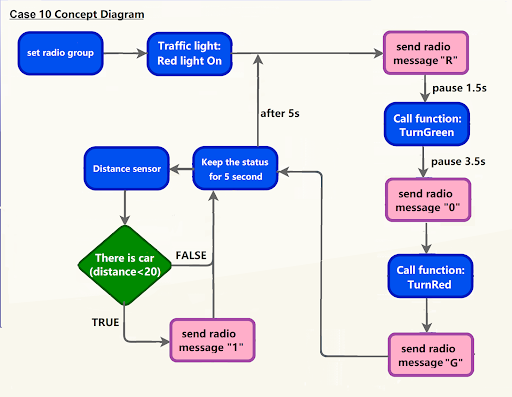
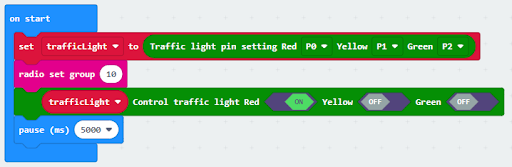
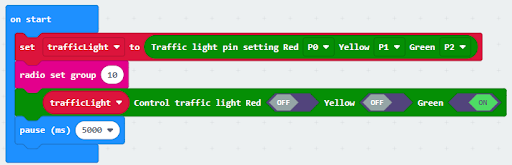
Step 3. Initialize the program¶
Drag set variable trafficLight to Traffic light pin setting Red P0 Yellow P1 Green P2 to on start
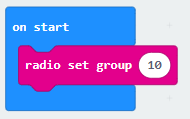
Drag radio set group 10 to on start
Control traffic light red on
Pause for 5s
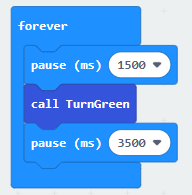
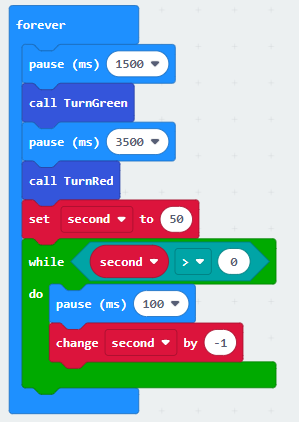
Step 4. Keep the green light status for 5 second¶
Call function TurnGreen
Pause 1.5s before TurnGreen
Pause 3.5s after TurnGreen
Step 5. Keep the red light status for 5 second¶
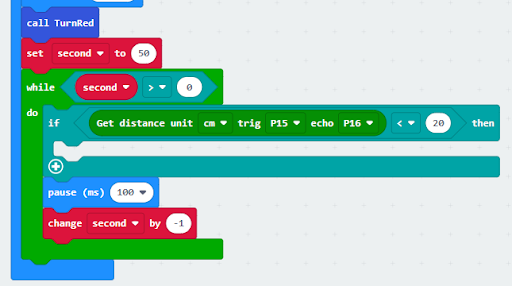
Call function TurnRed
set variable second to 50
While second > 0, snap pause to 0.1 second and change second by -1.
Step 6. Get distance value¶
Snap if statement into while loop, set get distance unit cm trig P15 echo P16 < 20
Step 7. Control traffic light 2 and car by sending radio number¶
Drag radio send number 1 into if
Drag radio send number 0 after TurnGreen
Drag radio send string “R” before TurnGreen
Drag radio send string “G” before TurnRed
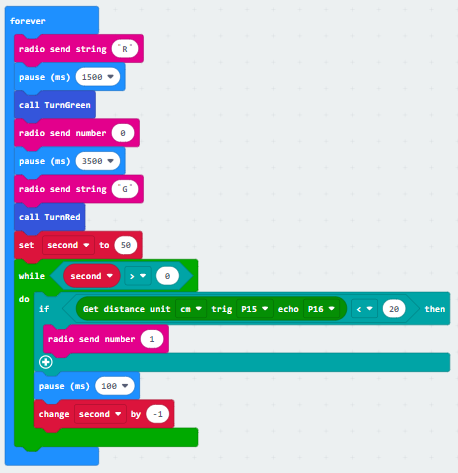
Full solution:
https://makecode.microbit.org/_Pm2eWtRwERU8
11.6.2. Traffic light 2:¶
Step 1. Set up new functions¶

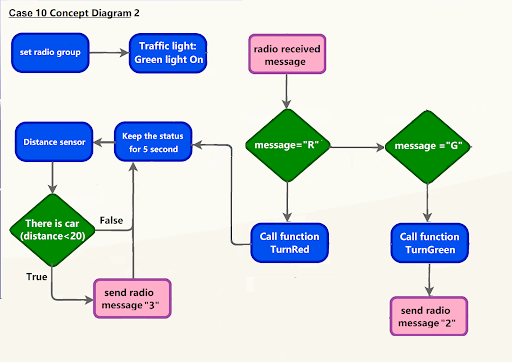
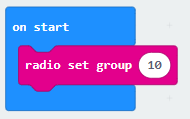
Step 2. Initialize the program¶
Drag set variable trafficLight to Traffic light pin setting Red P0 Yellow P1 Green P2 to on start
Drag radio set group 10 to on start
Control traffic light green on
Pause for 5s
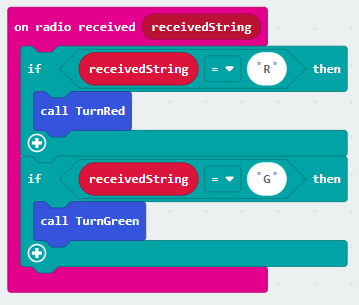
Step 3. Control traffic light and car by receiving different number¶
Snap if statement into on radio received receivedString
Set receivedString =“R” and call TurnRed
Set receivedString =“G” and call TurnGreen
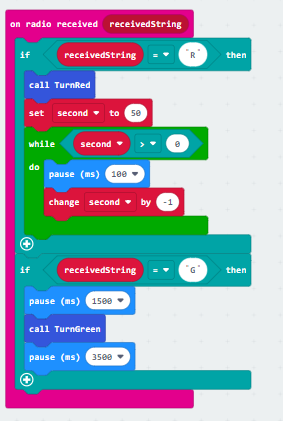
Step 4. Keep the red light status for 5 second¶
After TurnRed, set variable second to 50
While second > 0, snap pause to 0.1 second and change second by -1.
Before TurnGreen, pause 1.5s
After TurnGreen, pause 3.5s
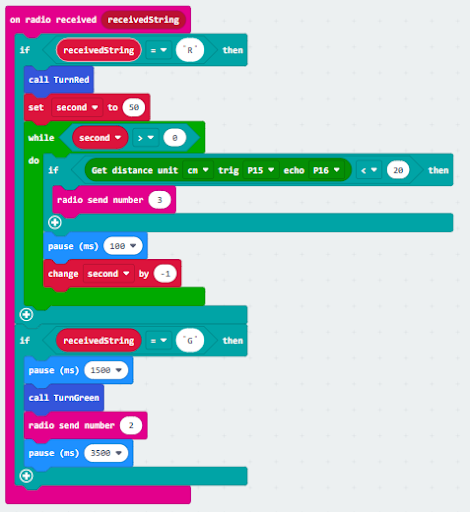
Step 5. Get distance value and control the car¶
Snap if statement into while loop, set get distance unit cm trig P15 echo P16 < 20
Drag radio send number 3 into if 將廣播發送數字1拖入 if 句式
Full solution:
https://makecode.microbit.org/_fudKTM57XTKA
11.6.3. Car 1:¶
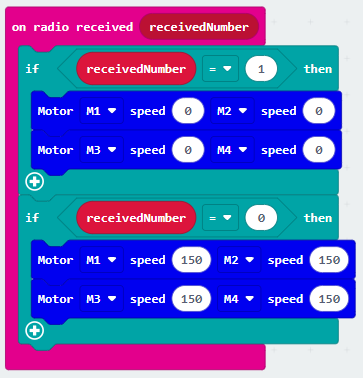
Step 2. Control car by receiving different number¶
Snap if statement into on radio received receivedNumber
Set receivedNumber =1 and make the car stop
Set receivedNumber=0 and make the car move forward 設
Full solution:
https://makecode.microbit.org/_1o1iRhg3qfRF
11.6.4. Car 2:¶
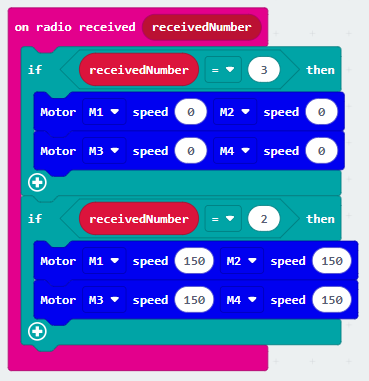
Step 2. Control car by receiving different number¶
Snap if statement into on radio received receivedNumber
Set receivedNumber =3 and make the car stop
Set receivedNumber=2 and make the car move forward
Full solution:
https://makecode.microbit.org/_YmH3PrRA14pC
11.7. Result¶
Distance sensor is used to detect whether there are cars passing by. If it is yes (i.e., there are cars passing by in the intersection), it sends a signal to the cars in the corresponding direction and alerts them to stop, in order to maintain a normal traffic flow of the intersection.
11.8. Think¶
Challenge question:
In case that it is a intersecion, there should be four traffic lights for four different directions. Can you write a program in that case?