3. 第三課¶

3.1. 簡介¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
3.2. 教學目標¶
讓學生清楚掌握Micro:bit 智能小車的AI鏡頭原理及其功用,並了解如何透過設計編程令AI鏡頭幫助智能小車實現更多功能。
3.3. HuskyLens 顏色識別功能¶
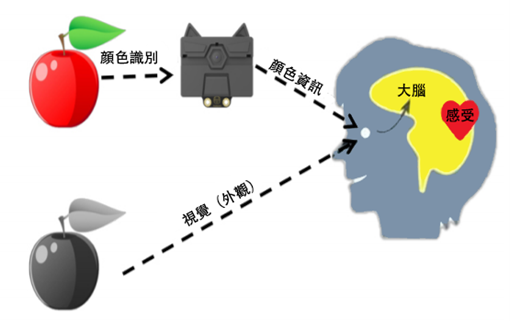
3.3.1. 顏色識別是什麽?¶
在HuskyLens裏的顔色識別功能,Huskylens能學習新的顔色,及透過輸入不同的顔色名字,而在下一次當Huskylens 感應到同一個顏色的時候,便會顯示顔色的ID。
3.3.2. 顏色識別的應用¶
無障礙服務: 幫助色弱人士理解不同事物的顔色差別,或將顔色轉化為色盲人士認識能夠分辨的顔色
攝像監控系統:可透過顔色追踪罪犯逃走使用的車子
物流管理:很方便地對貨物類型或型號進行自動識別,成本低,操作方便。
3.3.3. Huskylens 的顏色識別¶
而HuskyLens的顏色識別功能可以分爲偵測顏色、學習顏色及識別顏色三個部分。
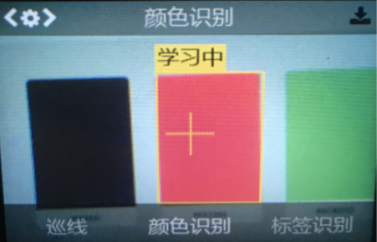
3.3.3.2. 學習顏色:¶
偵測到顏色後,按下“學習按鍵”學習顏色,並鬆開以結束學習。在倒計時的消息結束前按下“學習按鍵”,可以繼續學習下一種顏色。如果不再需要學習其他顏色,則在倒計時結束前按下”功能按鍵”,或等待倒計時結束。
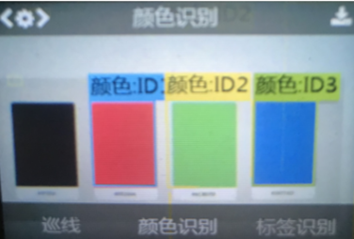
3.3.3.3. 識別顏色:¶
如遇到相同的顏色,屏幕上會有彩色邊框選出色塊,並顯示該顏色ID。邊框會自動跟踪色塊,其大小會隨色塊的面積變化。HuskyLens可以同時識別並追踪多種不同的顏色,而不同顏色對應著不同的邊框顏色。
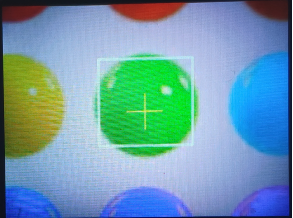
3.3.3.4. 調節識別框閾值¶
在識別相近顏色的色塊時,通過設置閾值可以調節識別的精度。比如在下圖中,顏色相近的黃色氣球沒被識別到,就是閾值設置過高。在顏色識別功能的二級菜單參數設置界面中,有“識別框閥值”參數,該參數的數值越低,精度越低,但識別的相近色塊就越多。
以下圖爲例,當閾值為20時,HuskyLens只能識別到一個黃色球,閾值為0時,3個黃色球都可以識別到。

3.4. 練習1:¶
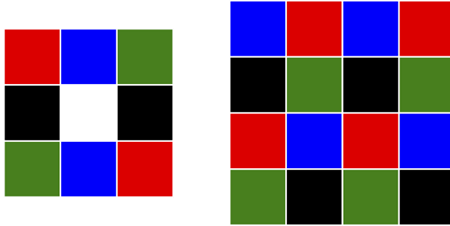
先熟識一下HuskyLens的顏色識別功能,先學習幾種顔色,讓不同顔色ID和方框顯示在屏幕上。
(如圖片太小,請將圖片放大或使用課程最後的附錄)
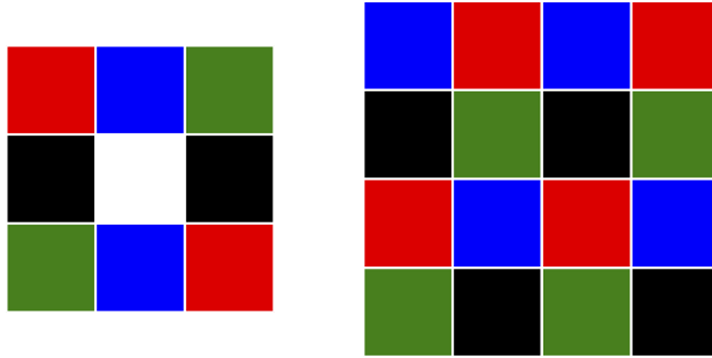
然後設計程序,以其中一種顔色ID爲目標,用Micro:bit板指示燈顯示該顔色色塊的數量。
例如左上圖紅色色塊數量 = 2,Micro:bit板顯示:
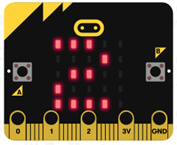
提示:使用以下積木

3.5. 練習2:¶
設計程序,學習其中一種顔色後(假設為ID1),當按下A按鈕,計算該顔色方形色塊的總面積並用Micro:bit板指示燈顯示結果。
(結果單位為HuskyLens眼中的 平方單位)
提示:
使用以下Huskylens積木獲取每一個色塊的高闊,面積 = (長)高度 × 闊度

建立」number」儲存」HuskyLens從結果中獲取ID 1 方框總數」
建立」area」儲存增加後的面積,使用迴圈將色塊面積逐個增加
3.6. 練習3:¶
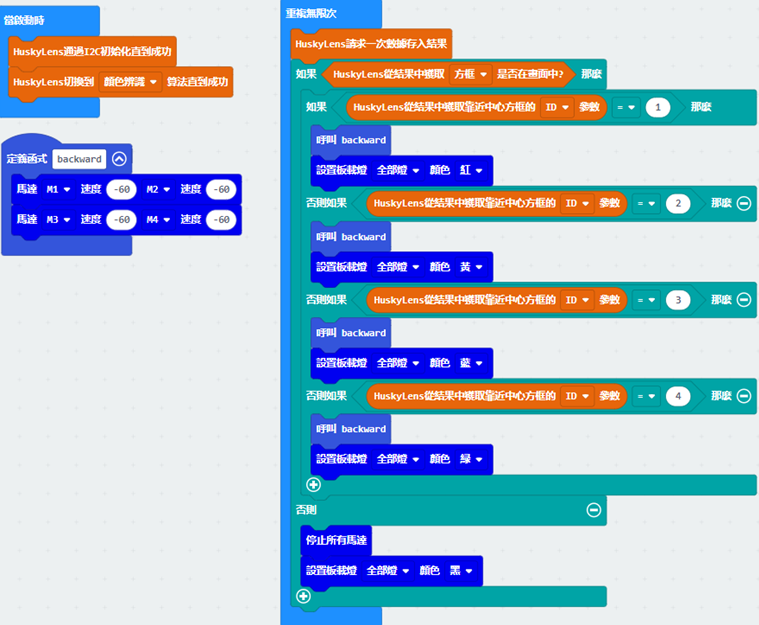
設計程序,車子根據HuskyLens看到的不同顔色亮起該顔色RGB板載燈,並看到任何已學習的顔色時後退,否則停下並關上RGB燈。
ID 1 亮起紅色
ID 2 亮起黃色
ID 3 亮起藍色
ID 4 亮起綠色




3.7. 練習4(挑戰):¶
(如非列印版本,觀測車子動作即可)
設計程序令車子在彩色道路(見下頁)上進行移動:
1)當Huskylens偵測到紅色最接近屏幕中心時,車子開始前進
2)直至Huskylens偵測到紫色格子最接近屏幕中心,車子短暫停下並開始後退
3)一直後退直至Huskylens再次偵測到紅色格子最接近屏幕中心,車子停下
在車子前進時,當HuskyLens分別偵測到紅、黃、綠、紫色最接近屏幕中心,microbit板播放中音C、E、G及高音C音色,並分別亮起一個該顔色的RGB板載燈。(在到達紫色格子時全部RGB板載燈應該已經亮起)
在車子後退時,當HuskyLens分別偵測到以上四種顔色最接近屏幕中心,播放同樣音色,但關起該顔色RGB板載燈,最後停止繼續播放任何音色。
提示:
先調校Huskylens角度望住紅色格子
建立變數」direction」記錄車子移動方向,以決定車子動作
建立變數」finish」判定車子是否已回到紅色格子
未回到(”false“)播放中音C一秒,並將finish設爲“true”
finish爲”true“時停止繼續播放音色
3.8. 答案¶
3.8.1. 練習1¶

3.8.2. 練習2¶
當A按鈕被按下,將面積設爲0,將number設為色塊數量,並在迴圈呼叫計算面積函式。
每一次在函式計算面積,先把高和闊初始化才能將供取得高度和闊度的函式(getWidth, getHeight)使用,而這兩條函式則將number設為最後一個色塊取得其高度和闊度。
計算的方式是透迴圈過把目前的色塊面積加上當前的總色塊面積,並number減少1,最後得出結果。

3.8.3. 練習3¶
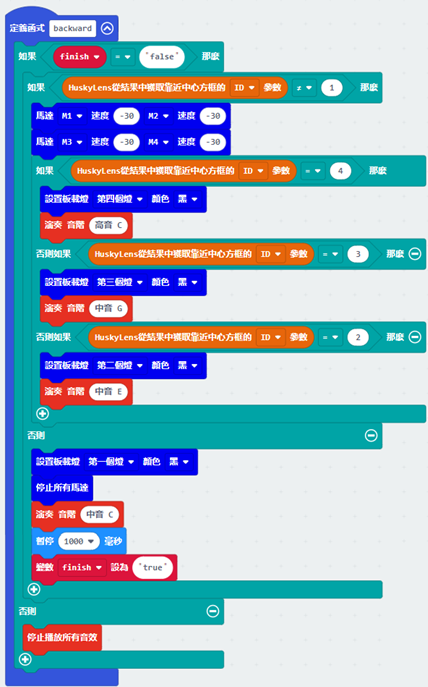
3.8.4. 練習4¶
程序開始時,先初始化所有變數、音效和板載LED燈。
當有任何( 已學習顔色 )方框在畫面,視乎direction( 方向 )呼叫forward( 前進 )和backward( 後退 )的程序。如沒有任何方框,關閉車子馬達、音效和板載LED燈。


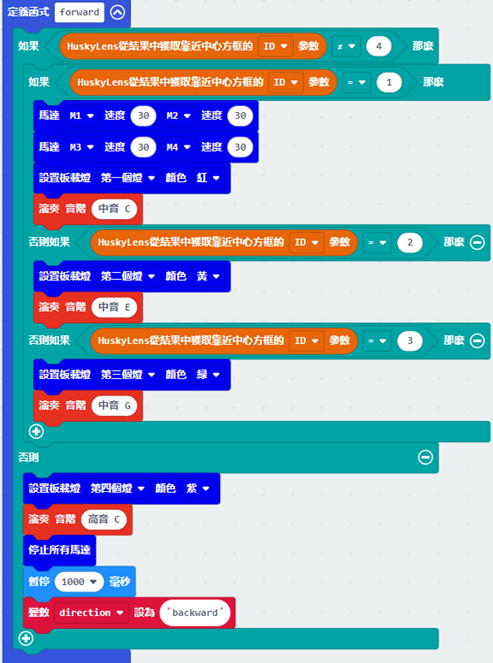
3.8.4.1. 前進的程序¶
先檢查顔色ID是否不等於4,是則繼續檢查顔色ID是否等於1、2、3
1則開始車子前進,亮起紅燈,播放中音C。2和3則分別亮起黃及綠燈,播放中音E和G
如ID等於4,亮起紫燈,播放高音C,停下車子一秒,direction( 方向 )改爲backward(後退)
3.8.4.2. 後退的程序¶
先檢查車子是否未完成任務(finish=”false”),否則檢查車子是否未到紅色格子(ID=1?)。
是則車子後退,然後檢查顔色ID是否等於4、3、2,是則關上相應RGB燈並播放音色。
如果車子重新走到紅色格子,關上最後一個RGB燈,車子停下,播放一秒中音C
finish設爲“true”,因而車子停止播放任何音色。