6. 第六課¶

6.1. 簡介¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
6.2. 教學目標¶
讓學生清楚掌握Micro:bit 智能小車的AI鏡頭原理及其功用,並了解如何透過設計編程令AI鏡頭幫助智能小車實現更多功能。
6.3. 循線功能¶
6.3.1. 循線功能是什麽?¶
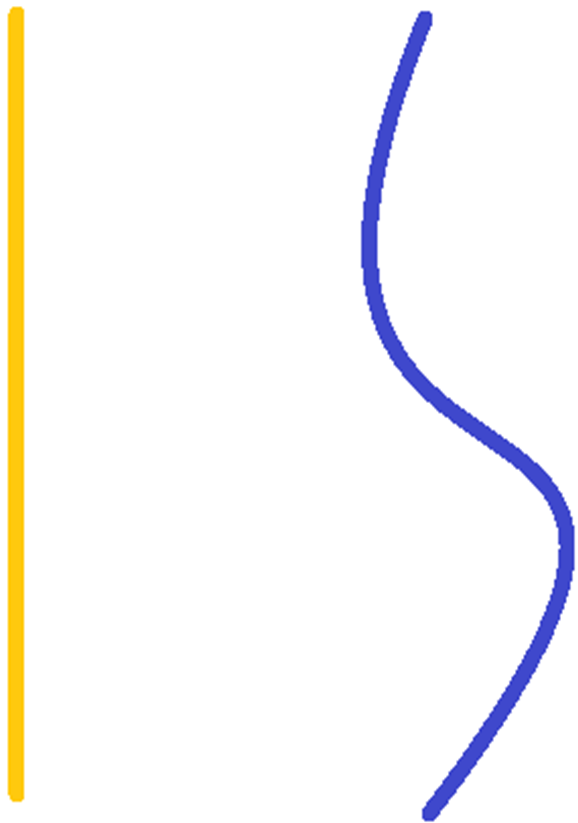
還記得Micro:bit智能小車本身配備了黑白感應器,讓其能夠進行巡線移動嗎?HuskyLens的巡線追踪也能實現類似的功能。然而除了黑白色之外,HuskyLens亦能識別不同指定顔色的線條,並進行路徑預測。
還記得以前教過如何使用黑白感應器實現巡線移動功能嗎? 使用HuskyLens的巡線功能雖然沒有辦法直接探測車子出界,但卻配備著辨認線條的功能。這令車子不但可以在線條範圍外直接找到線條,也可以在多於一條道路的情況選擇出正確路線。
6.4. 練習1¶
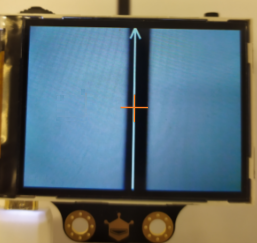
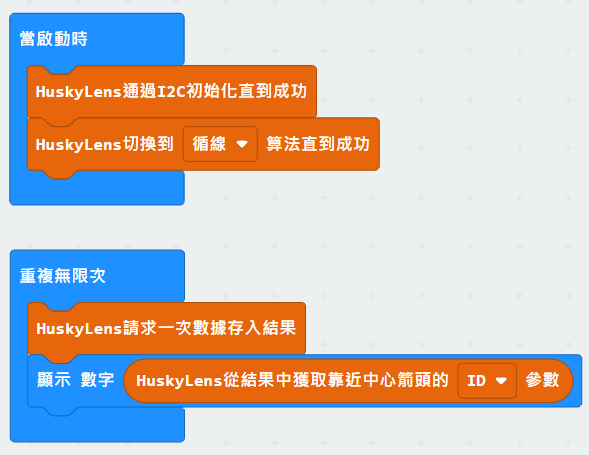
學習以下兩種線條後進行識別,設計程序在micro:bit版指示燈顯示最接近HuskyLens屏幕中心的線條ID,順便觀察一下HuskyLens路徑預測的特性。
提示:在學習線條後,需要結束學習以免大量白色箭頭影響顯示結果。
6.5. 練習2¶
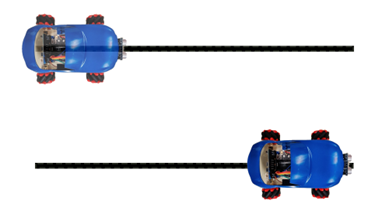
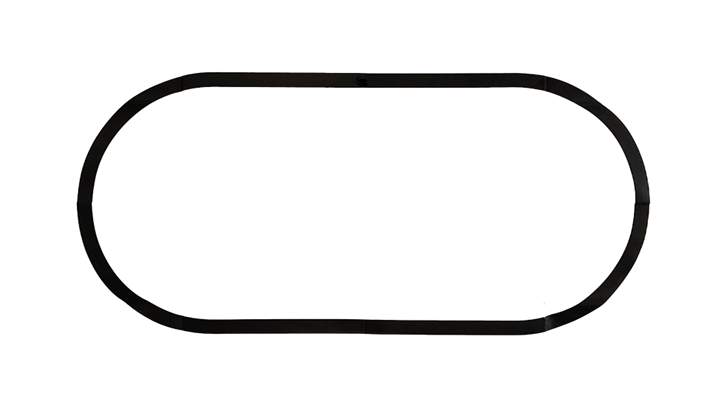
HuskyLens學習直線後設計程序,把車子放在直線上進行巡線前進,到達盡頭時停下。(假設車子不會出界至HuskyLens完全丟失直線)
**Husky畫面中不要有其他與線條相同顔色的物件在,效果更好
提示:
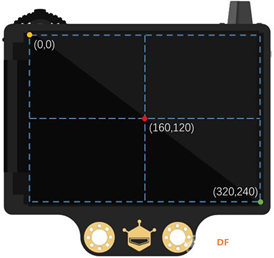
以不同的X起點決定車子應該前進、轉左還是轉右

X坐標範圍:0 - 320
Y坐標範圍:0 - 240
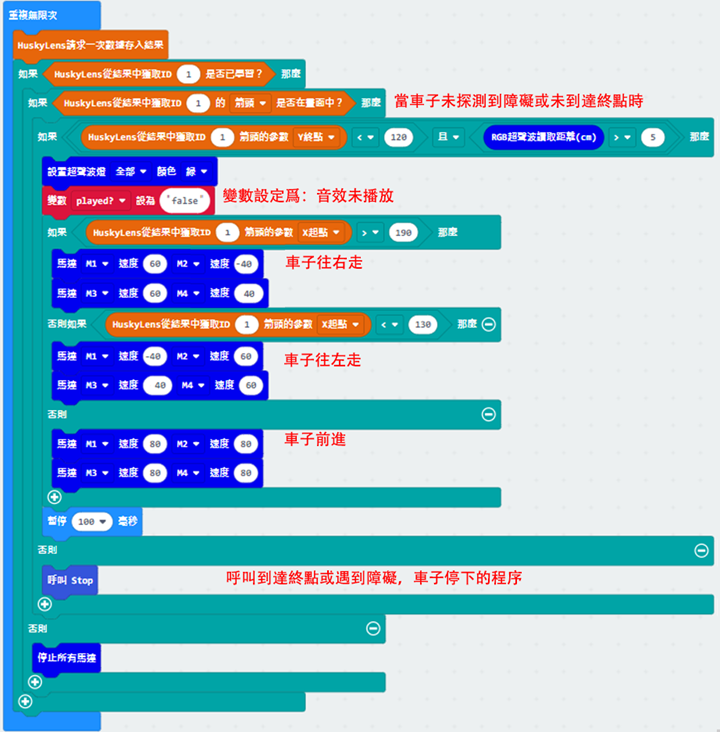
6.7. 練習4:巡線自動車¶
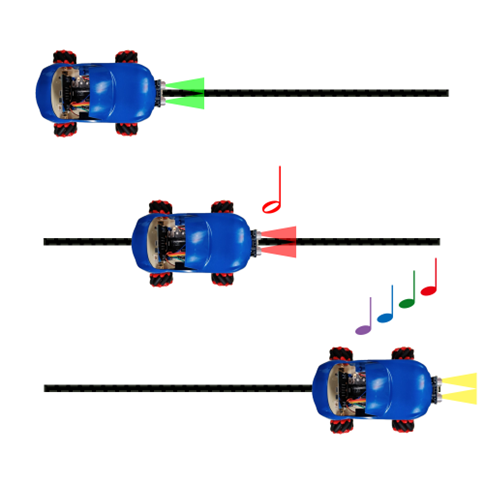
自動車除了能夠自動前進,也能夠探測障礙物避免撞上。
集合超聲波傳感器,改良練習2的程序。讓車子巡直線前進,並在遇上障礙物時停下。當沒有障礙物時重新巡線前進,直至到達終點(線外)。
沒有遇上障礙物時,打開綠色車頭燈。遇上障礙物時,打開紅色車頭燈,響鳴一次。到達終點後,打開黃色車頭燈,播放一次任務完成的音效。
6.8. 答案¶
6.8.1. 練習1¶
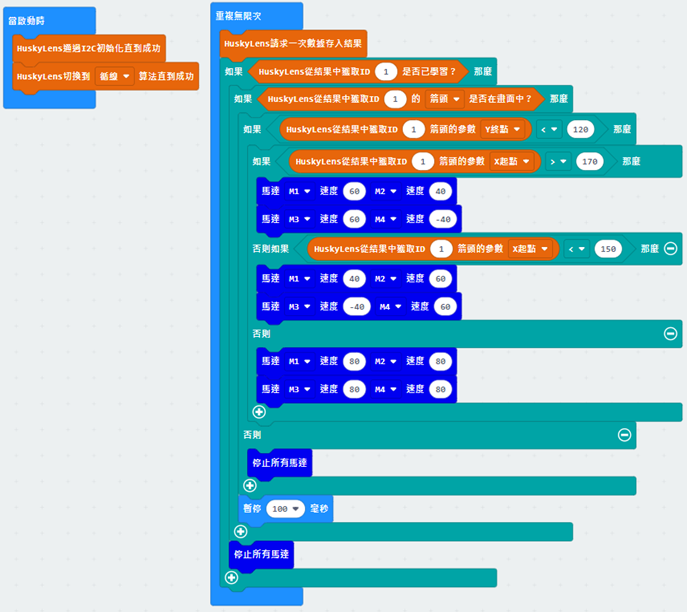
6.8.2. 練習2¶
箭頭終點為箭嘴尖端。當箭頭Y終點少於120(畫面一半),車子停下。
否則,當X起點大於170,車子轉右;當X起點少於150,車子轉左。
(160為畫面一半;170=160+10,150=160-10)
否則,當X起點介乎於150至170之間,車子前進。
箭頭不可能停留在畫面正中間,因此設立一個較大的前進數值範圍。