1. 第一課¶

1.1. 簡介¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
1.2. 教學目標¶
讓學生清楚掌握Micro:bit 智能小車的AI鏡頭原理及其功用,並了解如何透過設計編程令AI鏡頭幫助智能小車實現更多功能。
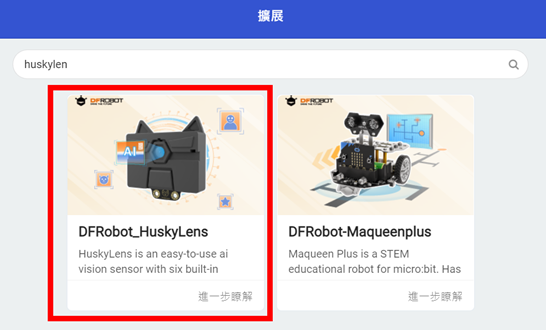
1.3. 認識HuskyLens¶
Huskylens 是一款易於使用的AI機器視覺傳感器,內置 7 項功能。
除了以下6項功能,還有物件分類功能可學習不同物件的差別自動進行分類。

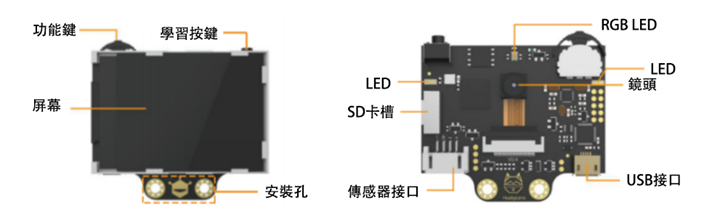
1.3.1. 使用方法¶
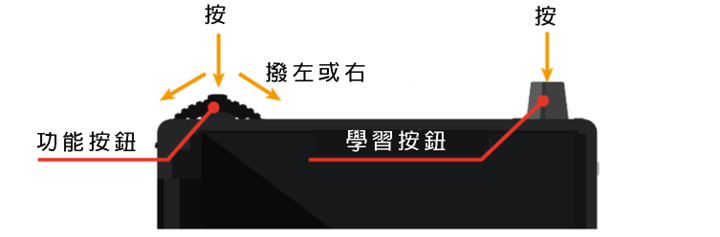
Huskylens主要有兩個按鈕,功能按鈕和學習按鈕。
向左或右撥功能按鈕能切換功能/模式
單擊功能按鈕能叫出功能菜單
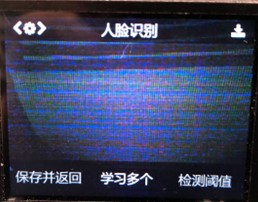
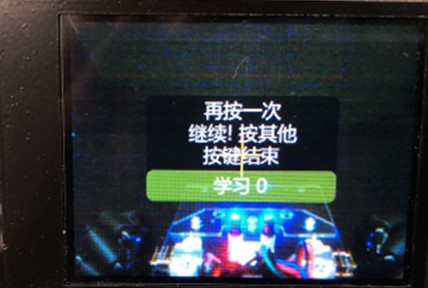
長按功能按鈕後,您可以設置是否學習多個目標:
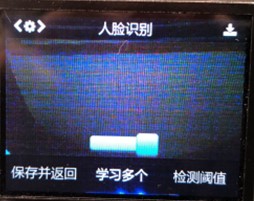
再按一次功能按鈕,可以拖移滾動條至右啓動「學習多個」
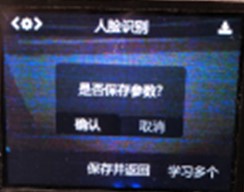
撥向保存並返回,按下功能按鈕可叫出確認視窗,再按下功能按鈕便進行保存
單擊學習按鈕能學習新的物件,物件的ID 會顯示在螢幕上。
長按學習按鈕能從不同角度和距離學習識別新的物件。
在每次學習目標後,需要在4秒内再次按學習按鈕一下以繼續學習(否則4秒後停止學習,必須先遺忘目標後再重新學習)
在停止學習後,再按兩次學習按鈕能夠遺忘已學習的物件
1.3.2. 安裝HuskyLens到車子¶
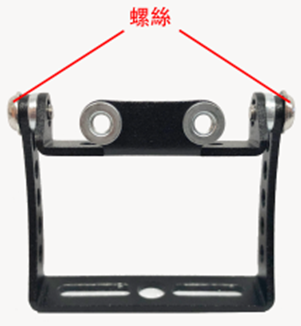
零件:

1)先用兩顆螺絲把小型安裝支架和加高支架連接起來。
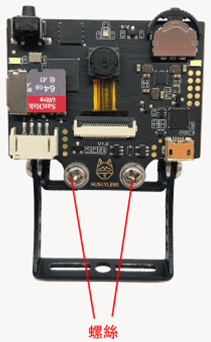
2)用兩顆螺絲把HuskyLens主板裝到小型安裝支架上。
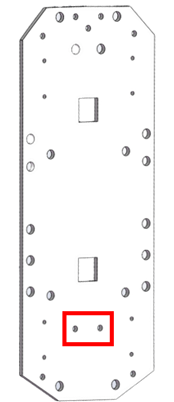
3)使用兩根六角(塑膠)柱、兩顆螺絲以及螺絲帽將AI鏡頭裝到車尾的孔。
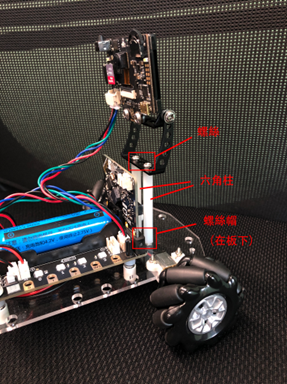
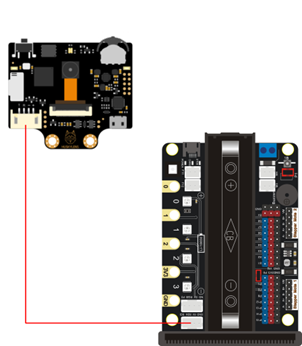
4)按下圖用4色線將HuskyLens接上micro:bit 擴展板。
完成圖:



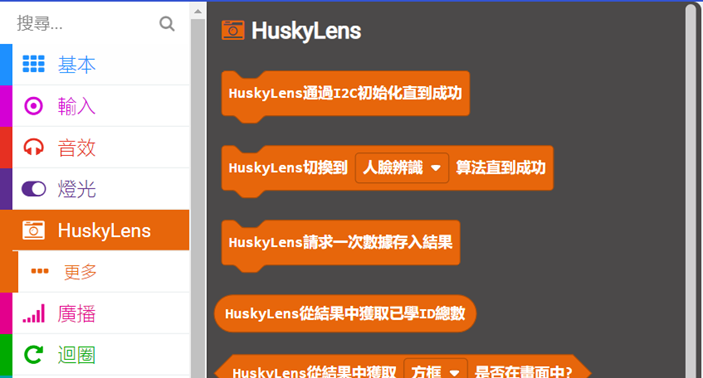
1.3.4. HuskyLens積木模塊¶

進行I2C初始化通信協議, **必需放在“當啟動時”積木中執行

切換到其他功能模式(車子一次只能運行一個模式)

向HuskyLens發出一次性請求,將讀取的數據儲存在“結果”(位於記憶體的變數),令其得以被其他HuskyLens積木讀取(每一次請求都會刷新一次“結果”中的數據)

從“結果”中獲取已被學習的目標ID總數

邏輯條件:檢查從“結果”中獲取的目標ID是否出現在畫面之中
(可選擇目標為方框或箭頭,箭頭一般只用於線條追蹤)
我們先熟習一下上面介紹的HuskyLens最基本的積木。
1.4. 練習1¶
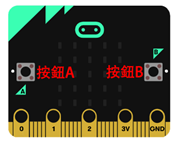
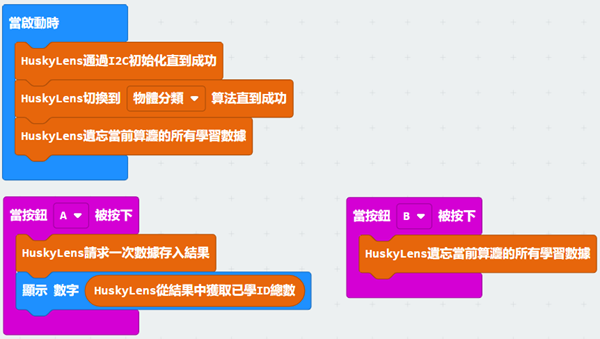
設計程序,運用HuskyLens、Micro:bit板A按鈕、B按鈕完成任務:
1)程序開始時,自動切換到物體分類模式
2)使用HuskyLens學習5種物件(ID)
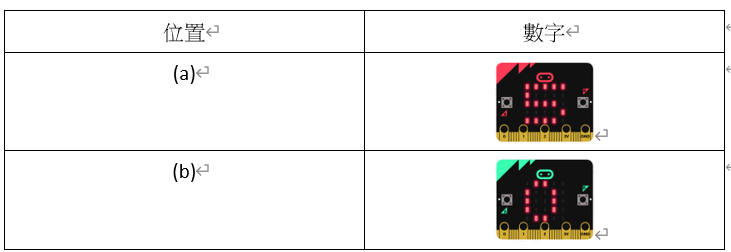
3)按下A按鈕:顯示學習物件數量——(a)
4)按下B按鈕:清除學習物件數據
5)再按下A按鈕,顯示學習物件數量——(b)
提示:使用HuskyLens >> 更多 >> ”遺忘積木“清除學習物件數據
| 位置 | 數字 |
|---|---|
| (a) | |
| (b) |
**嘗試一下在學習了物件之後重新打開HuskyLens,再按下A按鈕顯示數量,看看會出現什麽數字?從中可以得出什麽結論?那你的程序能否做出改良?
1.5. 練習2¶
設計程序,運用HuskyLens、Micro:bit板顯示燈、板載LED完成任務。
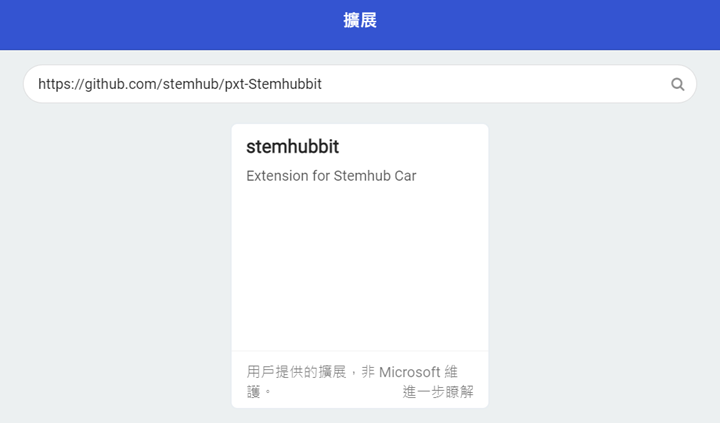
先加入stemhub:bit擴展包:https://github.com/stemhub/pxt-Stemhubbit
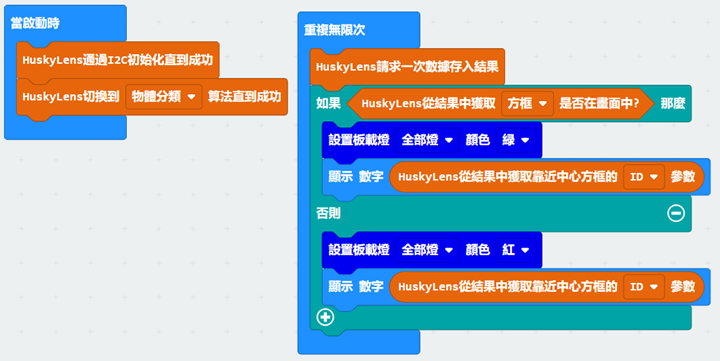
任務:
1)程序開始時,自動切換到物體分類模式
2)使用HuskyLens學習數件物件
3)如果有已學習物件在屏幕之内,Micro:bit板顯示最接近屏幕中心的物件ID,並將全部板載LED亮起為綠色,否則亮起紅色
如果沒有學習物件在屏幕内,Micro:bit板會顯示什麽數字?
答:
**提示:如果在學習物件後無法返回沒有任何學習物件在屏幕内的狀態(例如非學習物件被辨認為ID 1),可以按兩次學習按鈕遺忘所有學習數據
最後,你可以在不同模式之間切換嘗試練習一步驟(2-3),你會發現每一個模式得到的學習物件數量是獨立計算的。