7. 第七課¶

7.1. 簡介¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
7.2. 教學目標¶
讓學生清楚掌握Micro:bit 智能小車的AI鏡頭原理及其功用,並了解如何透過設計編程令AI鏡頭幫助智能小車實現更多功能。
7.3. HuskyLens 物件追蹤功能 (上)¶
7.3.1. 物件追蹤是什麽?¶
Huskylens 的物件追蹤功能夠在學習並追踪一個特定的物體。物件追蹤的基本原理是在學習並識別了物體後,透過驗算法預測物件的動作,並於影像序列中追蹤符合物件外觀特徵信息的部分。當攝像頭畫面再次出現學習過的物體時,HuskyLens可以將其識別,並自動進行追蹤。同一個物體的照片,學的越多,識別越精準。
7.3.2. 物件追蹤的應用¶
事件偵測:可針對車流中的停止車輛、低速車輛、逆行車輛、行人及煙霧偵測等交通事件進行偵測,以便即時進行應變措施
指揮交通:透過偵測經過的車輛數量,測量停滯時間,並將資訊提供給紅綠燈,以提升交叉路口行車管理效率
人機互動:透過追踪人類的動作,使機器學習識別和理解人的動作、動作、人類
虛擬實境:透過追踪與分析人體運動,在虛擬環境中模擬出虛擬角色的動作,可用於以捕捉玩家身體動作來進行的遊戲 ,如Xbox Kinnect和VR 遊戲
7.3.3. Huskylens 的物件追蹤¶
而HuskyLens的巡線追踪功能可以分爲學習物體和追踪物體兩個部分。
7.3.3.1. 學習物體¶
把HuskyLens對準需要追踪的物體,調節物體與HuskyLens的距離,將物體或特徵鮮明的局部包含在屏幕中央的橙黃色方框內。長按“學習按鍵”時,調整角度和距離,使HuskyLens得以從不同的角度和距離學習該物體。學習過程中,屏幕上的黃框會標註“學習中:ID1”。當HuskyLens在不同的角度和距離都能追踪到該物體時,便可結束學習。

7.3.3.2. 追踪物體¶
移動HuskyLens或者目標物體,屏幕中的框會自動追踪目標物體。追踪物體時,會顯示“學習中:ID1”,表示HuskyLens一邊追踪物體,一邊學習,這樣設置有助於提高物體追踪的能力。當識別效果客觀,便可關閉一邊追踪一邊學習的功能。

7.3.3.3. 關閉同一時間進行追踪和學習的方法¶
在物體追踪模式長按“功能按鍵”,進入二級菜單參數設置,找到並選擇“學習開啟”,再單擊一下“功能按鍵”即可令進度條顏色變白,代表功能已經關閉。最後選擇“保存並返回”退出二級菜單。
7.4. 練習1¶
先熟悉一下物件追蹤功能。擺出任意一種手勢(可參考下圖),利用HuskyLens從不同角度及距離進行學習。

結束學習後,維持手勢並移動手至不同距離及畫面中的不同位置,觀察物件追蹤的效果。然後,嘗試切換至各種不同手勢,再重新擺出原來的手勢,直至HuskyLens可以重新辨認並繼續進行追蹤。


7.6. 練習3¶
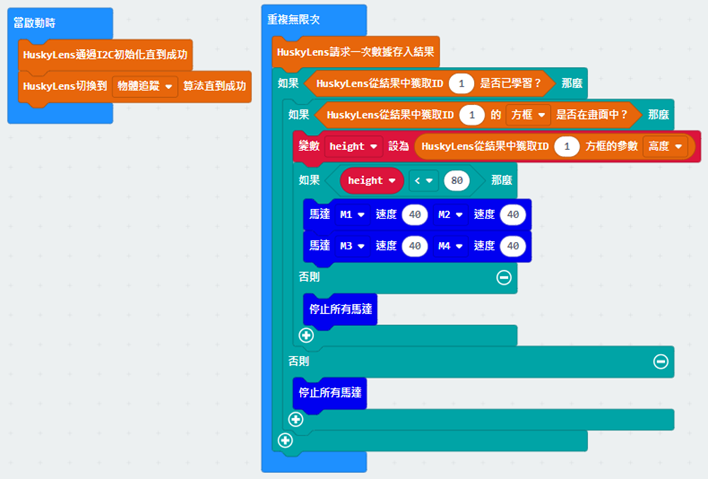
利用HuskyLens物件追蹤實現探測障礙功能。學習一件物件後將其放在車子正前方。當HuskyLens探測到該物件,車子前進,並在與物件相撞前刹車,不能使用超聲波傳感器。物件拿遠後,車子重新前進。
*****把同一時間進行追踪和學習的功能關閉,否則當車子一邊靠近物件,HuskyLens會一邊把周圍的多餘物件也一起學習掉,造成誤判
提示:
我們平時如何靠眼睛知道自己是否靠近物件?
HuskyLens物件追蹤的學習框預設是70*70平方單位
在較遠的距離學習物件效果更佳
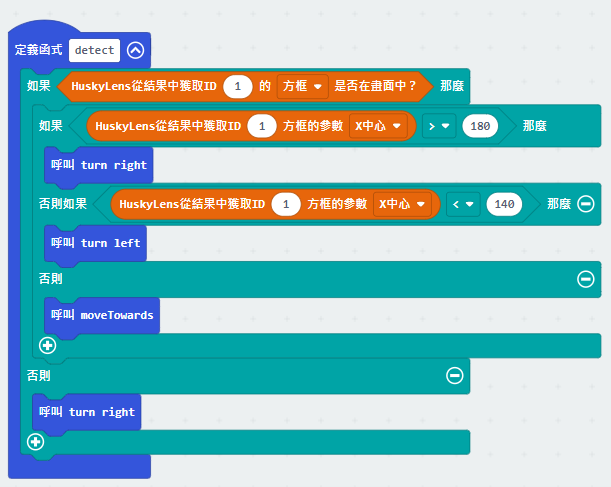
7.7. 練習4¶
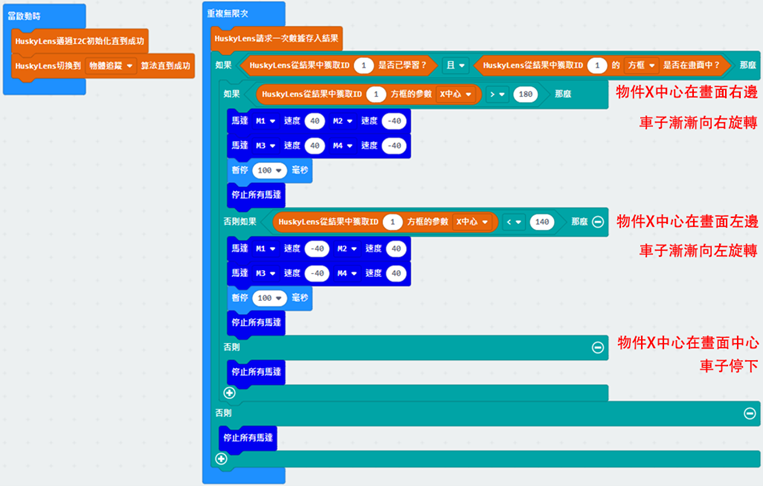
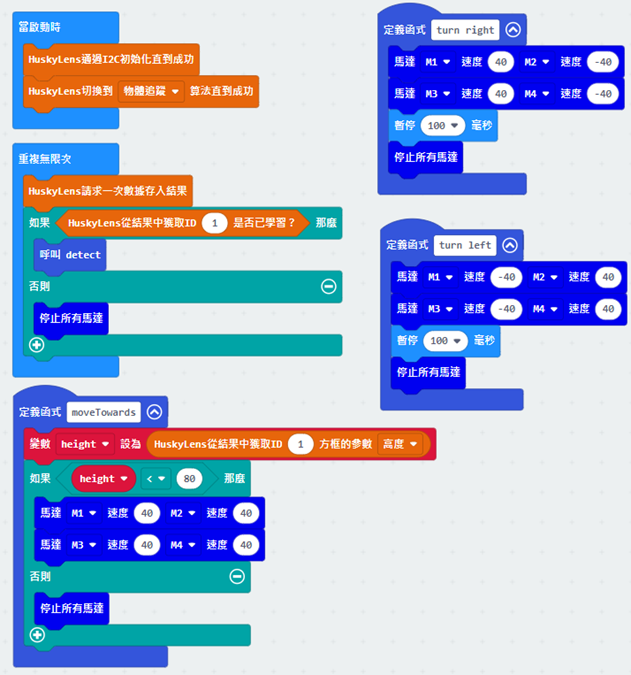
結合練習2和練習3的内容,設計程序。在使用HuskyLens於遠處學習一件物件後,把車子的方向倒轉,然後讓車子自動尋找物件。當探測到物件在畫面内,車子面向並往物件方向移動,直到靠近時停車。