2. 第二課¶

2.1. 簡介¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
2.2. 教學目標¶
讓學生清楚掌握Micro:bit 智能小車的各種擴展工具及其功用,並了解它們的安裝以及積木編碼操作方式。
2.3. 練習1¶
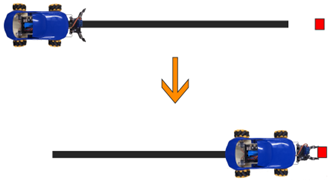
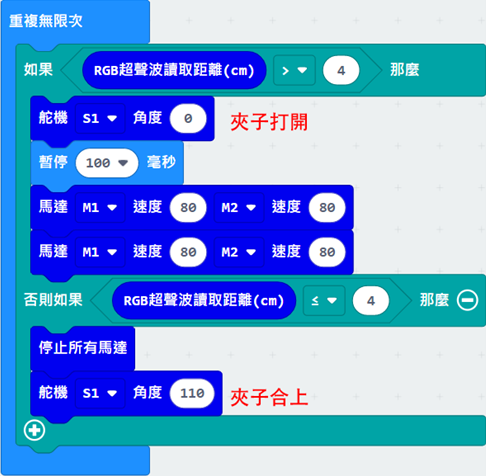
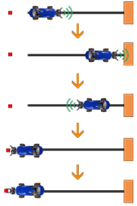
設計車子的程式完成任務。
1)將車子放到黑線開端(起點)
2)車子以夾子打開狀態巡線前進
3)到達終點(黑綫外)後,車子停下,合上夾子並夾住目標物件
提示:需把物件放到正確距離,以及適當調節車子(馬達)的移動速度,合上夾子時才能更易成功夾住物件。
安裝超聲波傳感器:
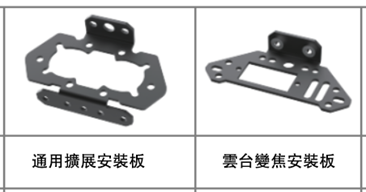
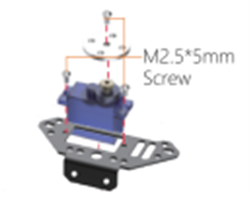
1)用三顆M2.5*5mm螺絲組裝好另一個舵機,並裝上雲台變焦安裝板(pan-tilt-zoom mount plate)。
2)將超聲波傳感器放入通用擴展安裝板,並用兩顆M3*5mm螺絲將通用擴展安裝板裝上雲台變焦安裝板。**看下圖留意通用擴展安裝板和超聲波傳感器的正確安裝方向

3)用兩顆螺絲、兩顆螺絲帽、兩條銅柱將夾子連同超聲波傳感器安裝到車子上。(**主意雲台變焦安裝板的方向)
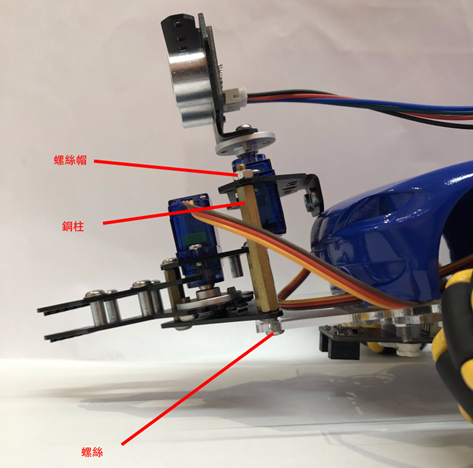
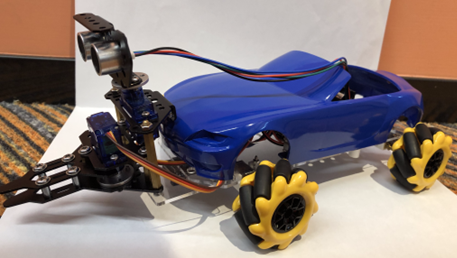
完成圖:
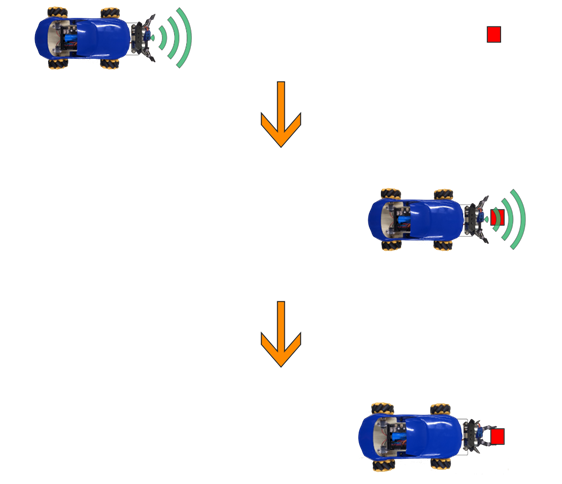
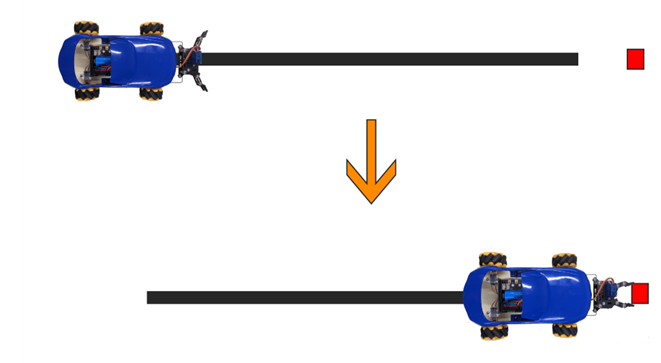
2.5. 練習3¶
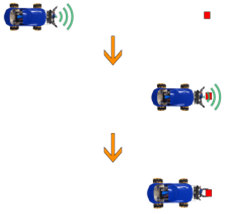
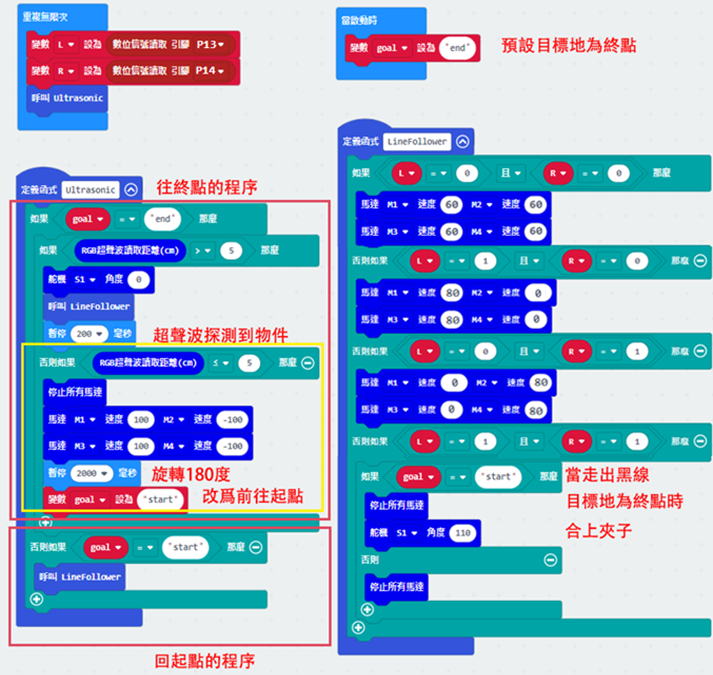
結合練習1和2,使用超聲波和巡線傳感器完成任務。
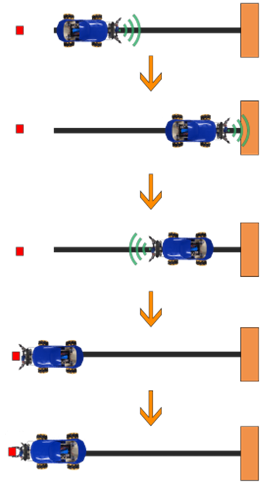
1)將車子放在黑線上進行巡線移動
2)當超聲波第一次探測到障礙,小車180度調頭
3)巡線回到起點
4)走出黑線時,小車停下並夾住物件
(預設車子只會在回到起點時完全走出黑線)
提示
建立變數“goal”記錄目的地,並用於條件積木(以文字“start”和“end”分別代表起點和終點)
留意超聲波、巡線及“goal”的條件檢查次序