9. 第九課¶

9.1. 簡介¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
9.2. 教學目標¶
讓學生清楚掌握Micro:bit 智能小車的各種擴展工具及其功用,並了解它們的安裝以及積木編碼操作方式。
9.3. 可升降夾子¶
就像在科幻片和工廠裏的機械臂一樣,配搭上升降支架的夾子可以實現上下升降功能,進行不同高度的搬運工作。



9.5. 練習2¶
設計程序令車子巡黑線前進到終點,夾住物件後轉身180度巡線回到起點,將物件放下在較高的平台上。
提示:
夾子加上支架長度增加,佈置場地時預留足夠距離。
操作每一個工具時留意是否需要暫停。
建立變數“destination”記錄目的地,以目的地確定車子出界時的動作
9.6. 多功能工程車(夾子和叉子)¶
micro:bit小車雖有多種擴展工具,但它們的用途和使用的前提各有不同,因此我們能夠同時把兩種工具放到車上,一次過完成多個任務。
9.7. 練習3¶
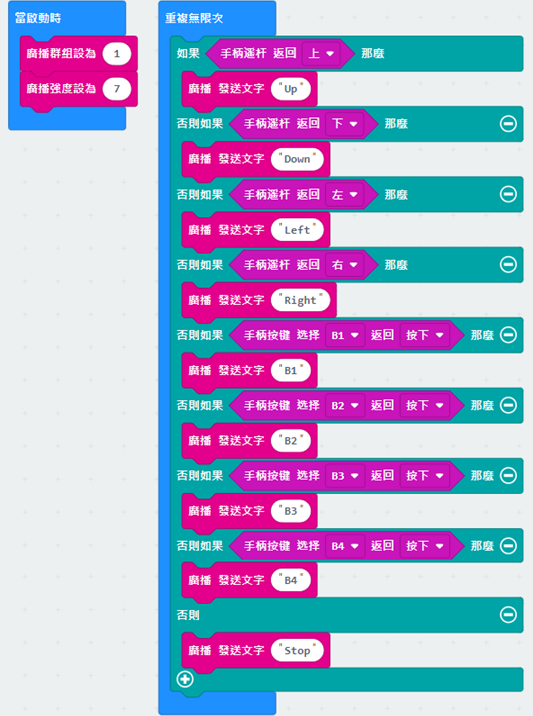
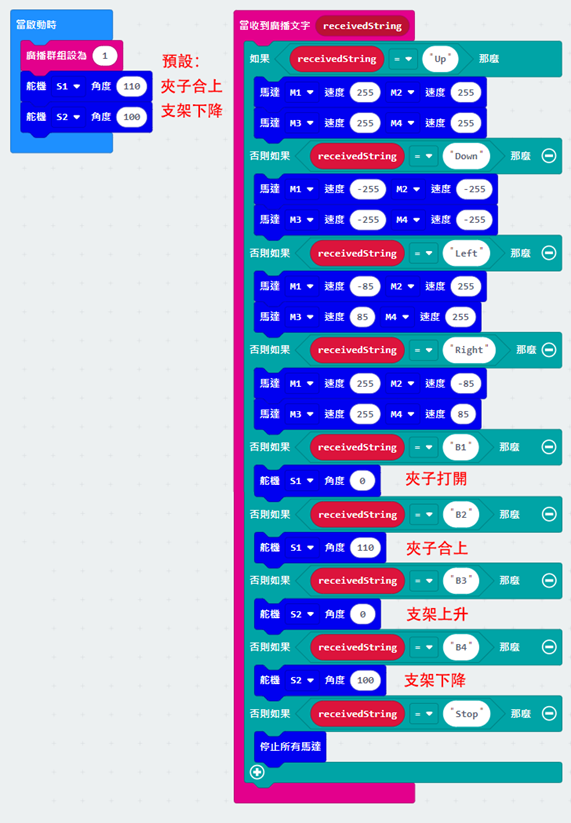
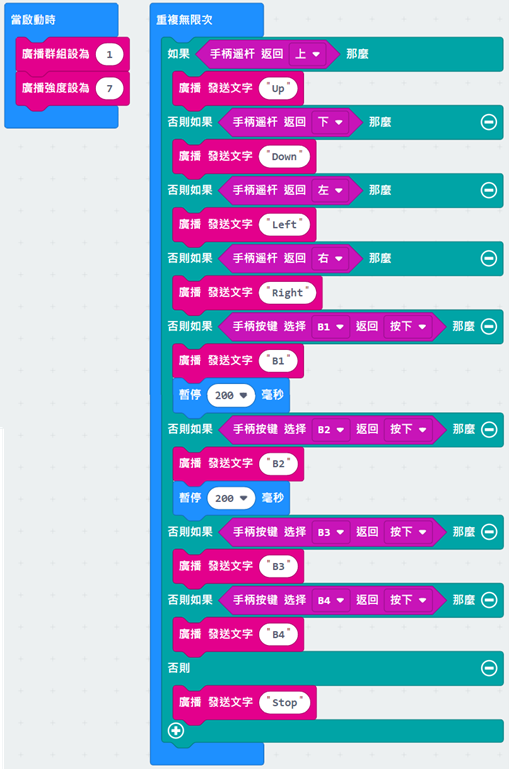
我們現在把夾子和叉子組裝在同一架車,然後用遙控器的四個按鈕分別控制工具開合、升降,以及原地向左和向右自轉。
(安裝兩件工具令車子體積增加,原地自轉使車子在狹窄處移動更方便)
任務:首先把貨物夾到貨架上,然後利用叉車把貨物送到終點。
提示:
叉車在車子前面,夾子在車子後面
直接改良練習1程序
建立變數記錄兩種工具使用狀態,以此狀態決定工具的下個動作