5. 第五課¶

5.1. 簡介¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
5.2. 教學目標¶
讓學生清楚掌握Micro:bit 智能小車的各種擴展工具及其功用,並了解它們的安裝以及積木編碼操作方式。
5.3. 認識Micro:bit擴展工具——叉子¶
Micro:bit 機械叉子(forklift) 主要由三隻叉齒、升降支架和一個舵機(伺服馬達)而組成,一般安裝在車頭位置。
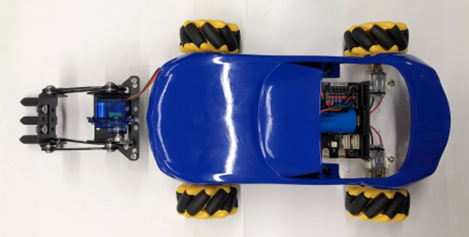
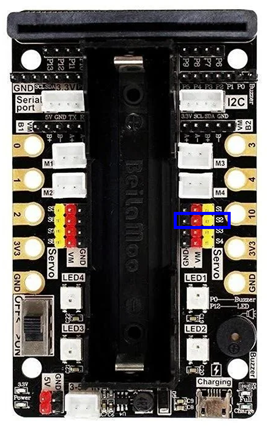
這次我們主要將舵機的引腳連至S2接口(紅框顯示的pin位)。
5.3.1. 機械叉子的原理及功用¶
叉車主要用於倉庫內貨物的裝卸搬運,能夠減輕裝卸工人繁重的體力勞動,提高效率。它的原理很簡單,先把鐵枝(紅圈)伸進貨架(紅框)裡,再利用機械的力量抬起貨物。要留意的是,物品要墊高一點,叉車才能搬運,就像在貨架上。


5.3.2. 安裝叉車¶
零件:
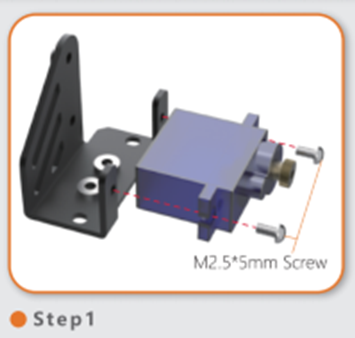
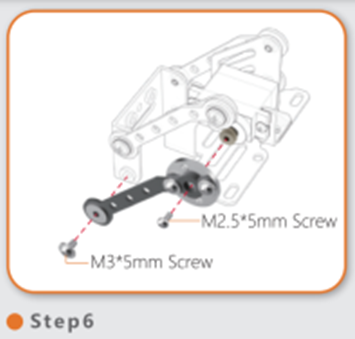
首先,利用兩顆M2.5*5mm 螺絲,把合金齒輪舵機安裝在舵機底座上。
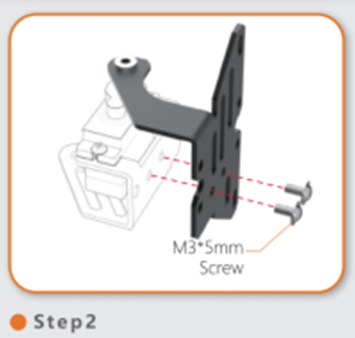
然後,把舵機打側,用M3*5mm 螺絲,把底板安裝在底座之下。
(底板比較長的一方面向後)

之後,用4顆M3*5mm 螺絲安裝連桿在舵機右面,臂板在舵機前方。

然後,用兩顆M3*5mm 螺絲把連桿安裝在舵機的左面。

接著,連接安裝板、舵機臂連桿和兩顆M3*5mm螺絲。
然後,把組裝好的連桿連接舵機和臂板的左方(舵機旁使用M2.5*5mm螺絲,臂板使用M3*5mm螺絲)

之後,用M3*5mm把叉車板安裝在臂板上。
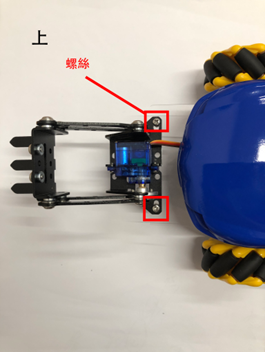
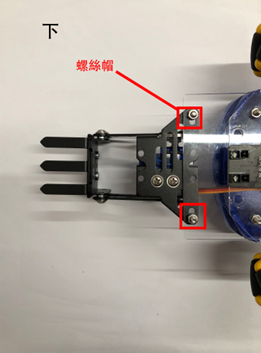
最後,用兩顆螺絲及兩顆螺絲帽將夾子安裝到車上。
5.6. 練習三¶
遙控小車及擴展工具
下載手制擴展包:
在黃框內輸入連結: https://github.com/lzty634158/GHBit ,將GHBit 加至makecode
還記得我們在初階課程裡學的遙控汽車嗎?
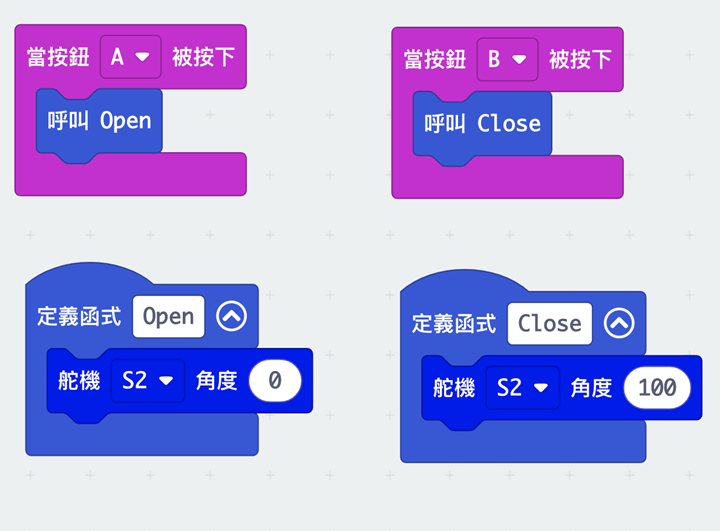
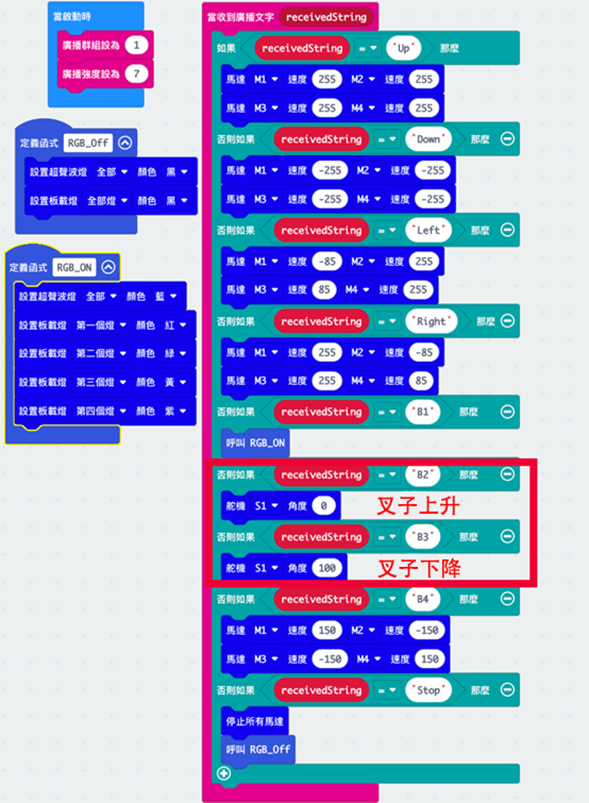
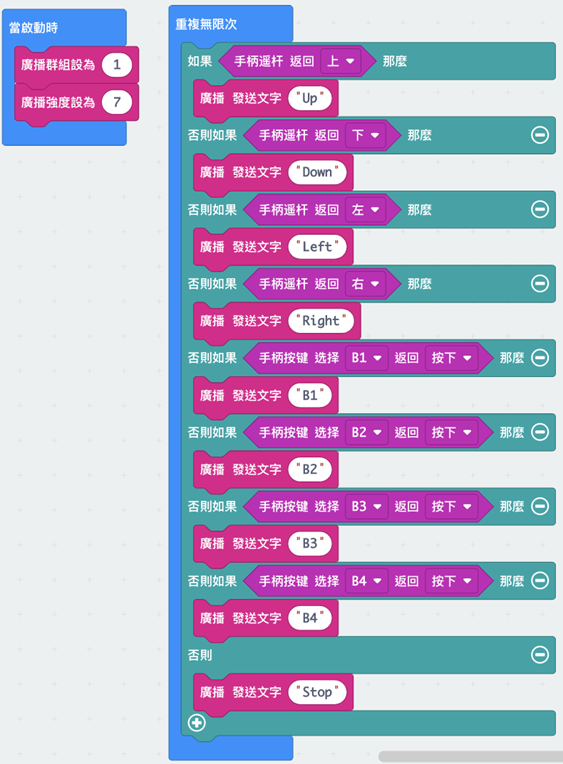
這次遙控器除了要控制車子,還要控制叉車升降的動作。
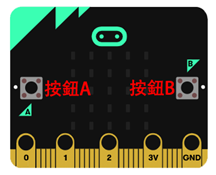
(提示:用兩個按鈕控制升降)