7. 第七課¶

7.1. 簡介¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
7.2. 教學目標¶
讓學生清楚掌握Micro:bit 智能小車的各種擴展工具及其功用,並了解它們的安裝以及積木編碼操作方式。
7.3. 認識Micro:bit擴展工具——推土機¶
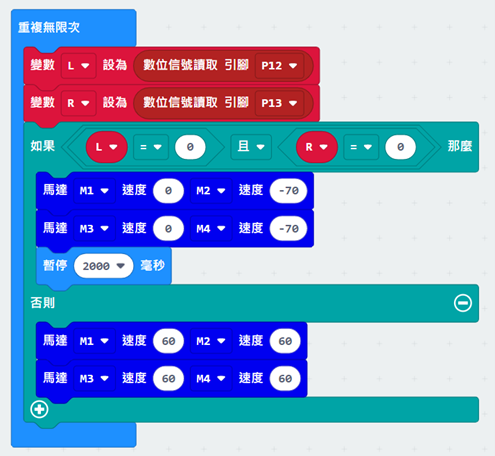
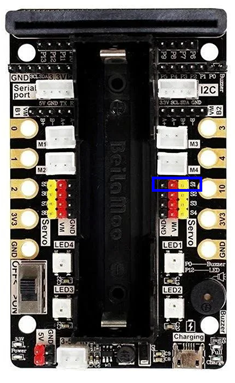
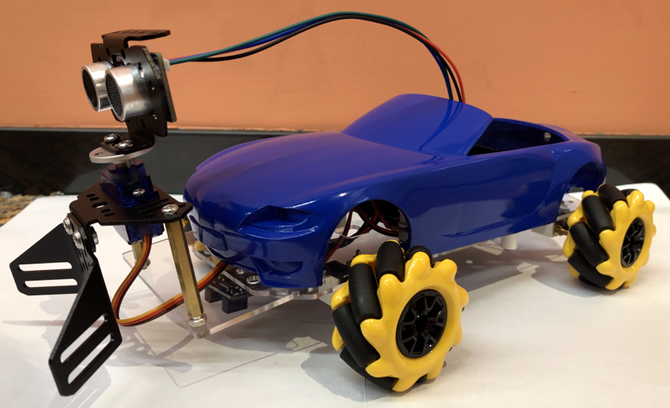
Micro:bit 機械推土機(bulldozer) 主要由推板、舵機(伺服馬達)加上超聲波傳感器組成,並安裝在車頭位置,這次我們主要將舵機的引腳連至S1接口(紅框顯示的是不同的pin位)。
這次我們主要將舵機的引腳連至S1接口(紅框顯示的pin位),一般深色線(黑色或啡色)連接到黑色GND接口。
7.3.1. 機械推土機的原理及功用¶
在現實生活中,推土機是一種工程車輛,前方裝有大型的金屬推土刀,能夠推送泥、沙及石塊等,視乎推土刀位置和角度可以調整,以適應鏟土、填土等工作,亦可用以清除障礙物。

而Micro:bit機械推土機不使用鋒利的推土刀,而是使用有洞子的推板代替完成工作,所以球體。

7.3.2. 安裝推土機:¶
零件 —— 一個超聲波傳感器加上:
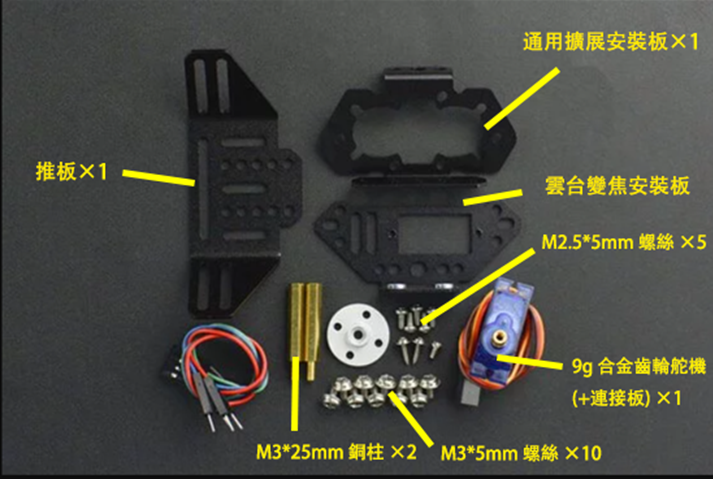
1)用兩顆M3*5mm螺絲將推板及雲台變焦安裝板(pan-tilt-zoom mount plate)連接起來。

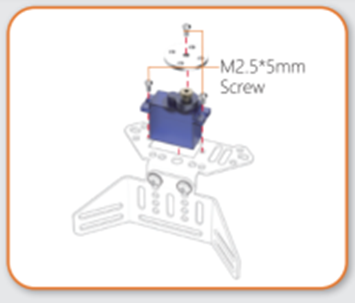
2)用三顆M2.5*5mm螺絲組裝好舵機,並裝上雲台變焦安裝板。
3)將超聲波傳感器放入通用擴展安裝板,並用兩顆M3.5mm螺絲將通用擴展安裝板裝上雲台變焦安裝板。

4)用兩顆螺絲、兩顆螺絲帽、兩條銅柱將雲台變焦安裝板連同超聲波傳感器安裝到車上。
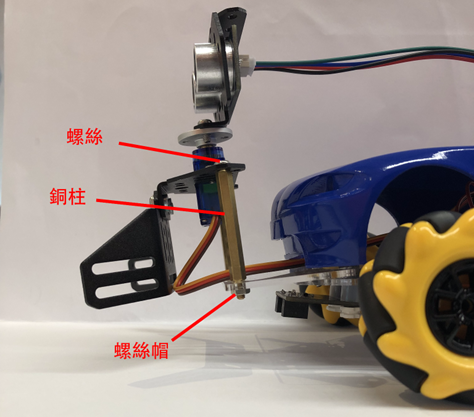
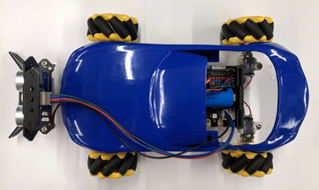
完成圖:
7.4. 練習1¶
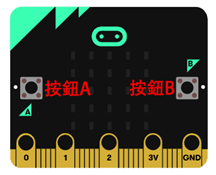
設計程式用Micro:bit板的按鈕令超聲波傳感器望向不同方向。
A按鈕望向正左方(270°),B按鈕望向正右方(90°),A+B按鈕望向正前方。
提示:
先調節舵機的安裝角度,令舵機模塊角度數值85為正面
只用舵機模塊0-180度無法令舵機超聲波傳感器望向正左方和正右方
需嘗試負數和180度以上的數值
| 超聲波傳感器面向方向 | 角度數值 |
|---|---|
| 正左方 | |
| 正右方 |