4. Lesson 4¶
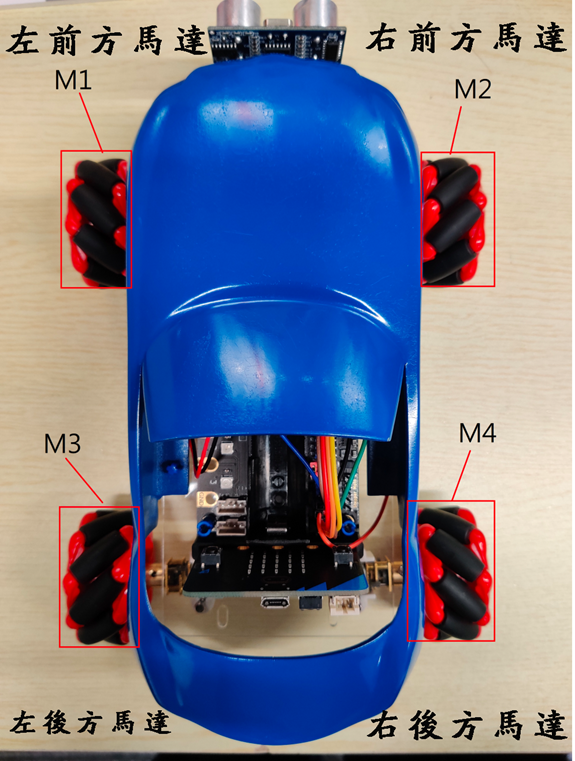
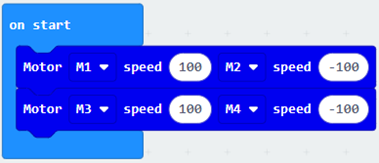
4.2. Block module that control motor¶
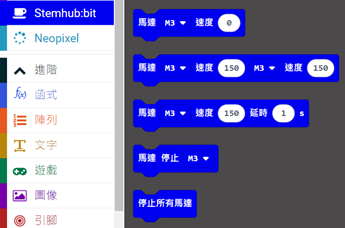

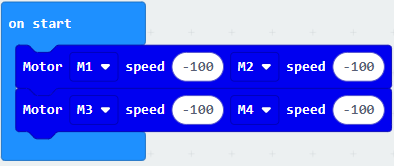
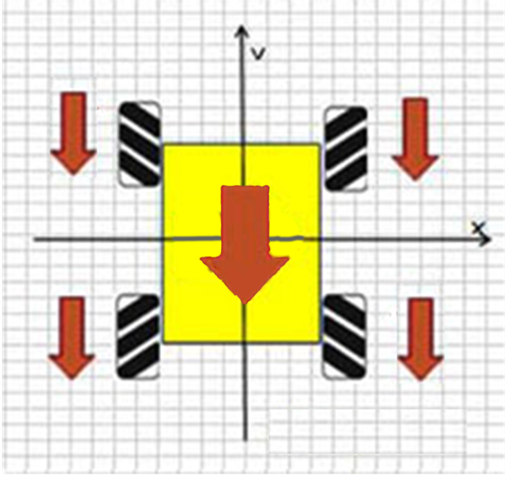
Select motor in yellow box.
Set speed in orange box. From -100 to 100,
negative means the wheel is spinning
backward and positive means the wheel is spinning forward.

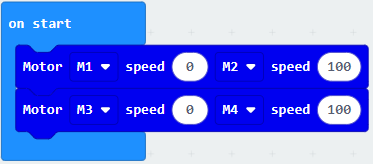
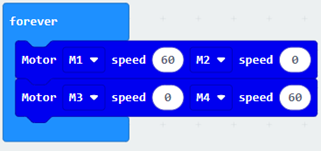
4.2.3. Turn to the left¶
Changing the speed of “M1”and “M3” to 0, “M2” and “M4” be 100, and the car will turn to left.
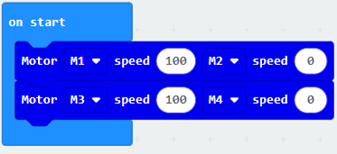
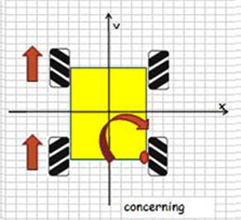
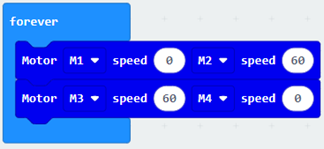
4.2.4. Turn to the right¶
Vice versa,changing the speed of “M1”and “M3” to 100, “M2” and “M4” be 0, and the car will turn to right.
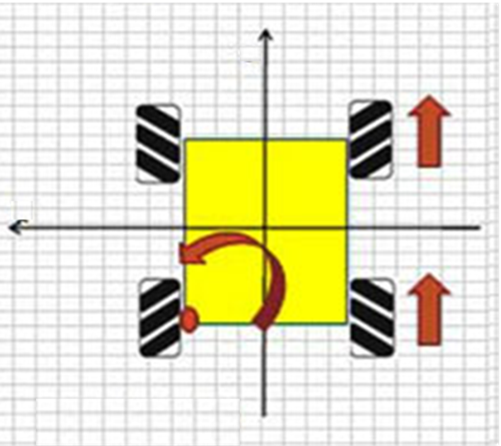
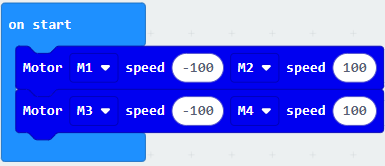
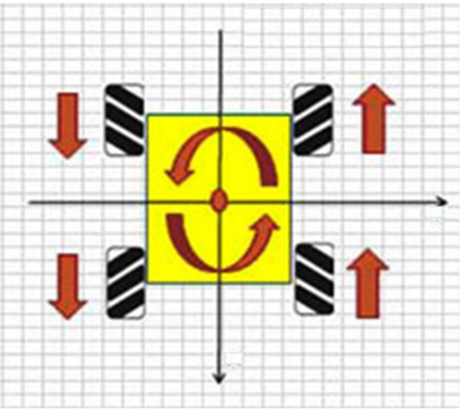
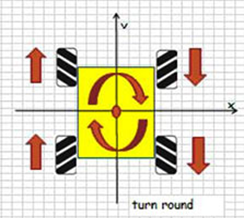
4.2.5. Spinning in anti-clockwise direction¶
Changing the speed “M1”and “M3” to -100, “M2” and “M4” to 100。
4.2.6. Spinning in clockwise direction¶
Changing the speed “M1”and “M3” to 100, “M2” and “M4” to -100。
4.2.7. Conclusion:¶
As the speed of each motor change, the trolley will be able to make different movements.
4.3. Exercise1: Horizontal movement of the car¶
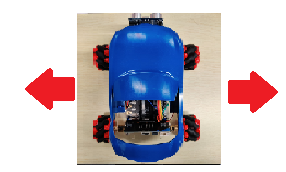
Design a program allows the car to move left and right horizontally。
hint:If 2 diagonal pairs of wheels is set to different rotating direction, the car will be able to move horizontally.
4.4. Exercise 2: Diagonal movement of the car¶
Design a program, and let the car move in diagonal direction.
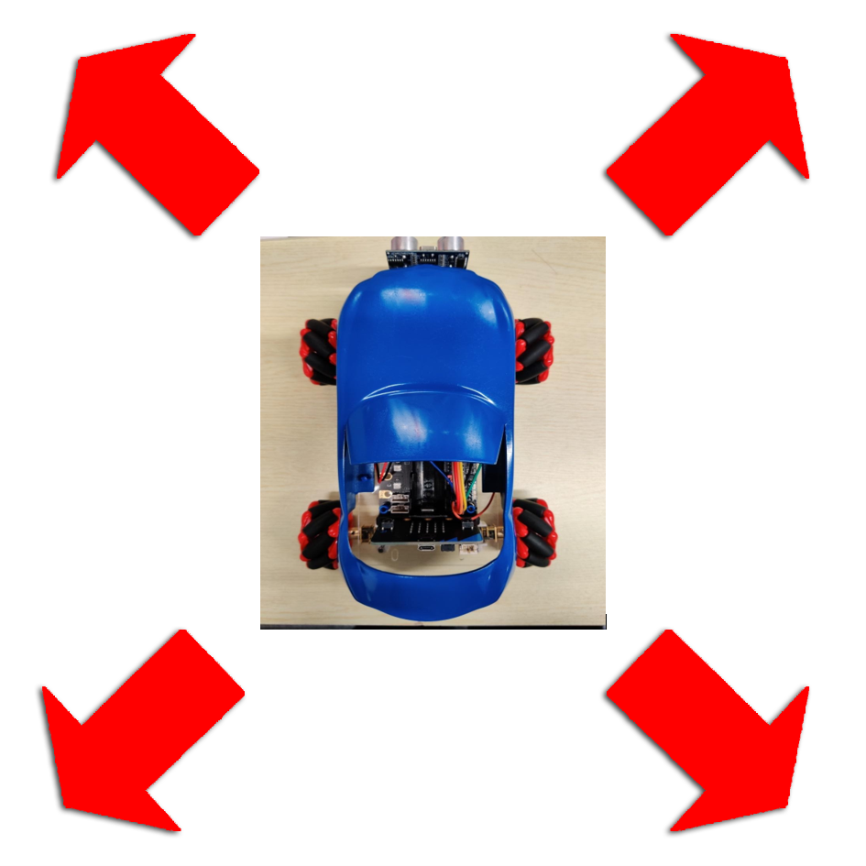
Hint:If 1 pair of diagonal wheels is rotating; the car will be able to move diagonally.
4.5. Exercise 3: Different ways to drive the car¶
Design programs that control the car to move around in a square, circle, and M shape route driving.
4.5.1. Moving around in a square:¶
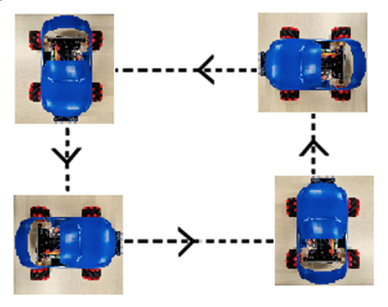
Hint:Whenever the car arrives the corner of the square, you need to rotate the car by 90 degree and continue moving forward.
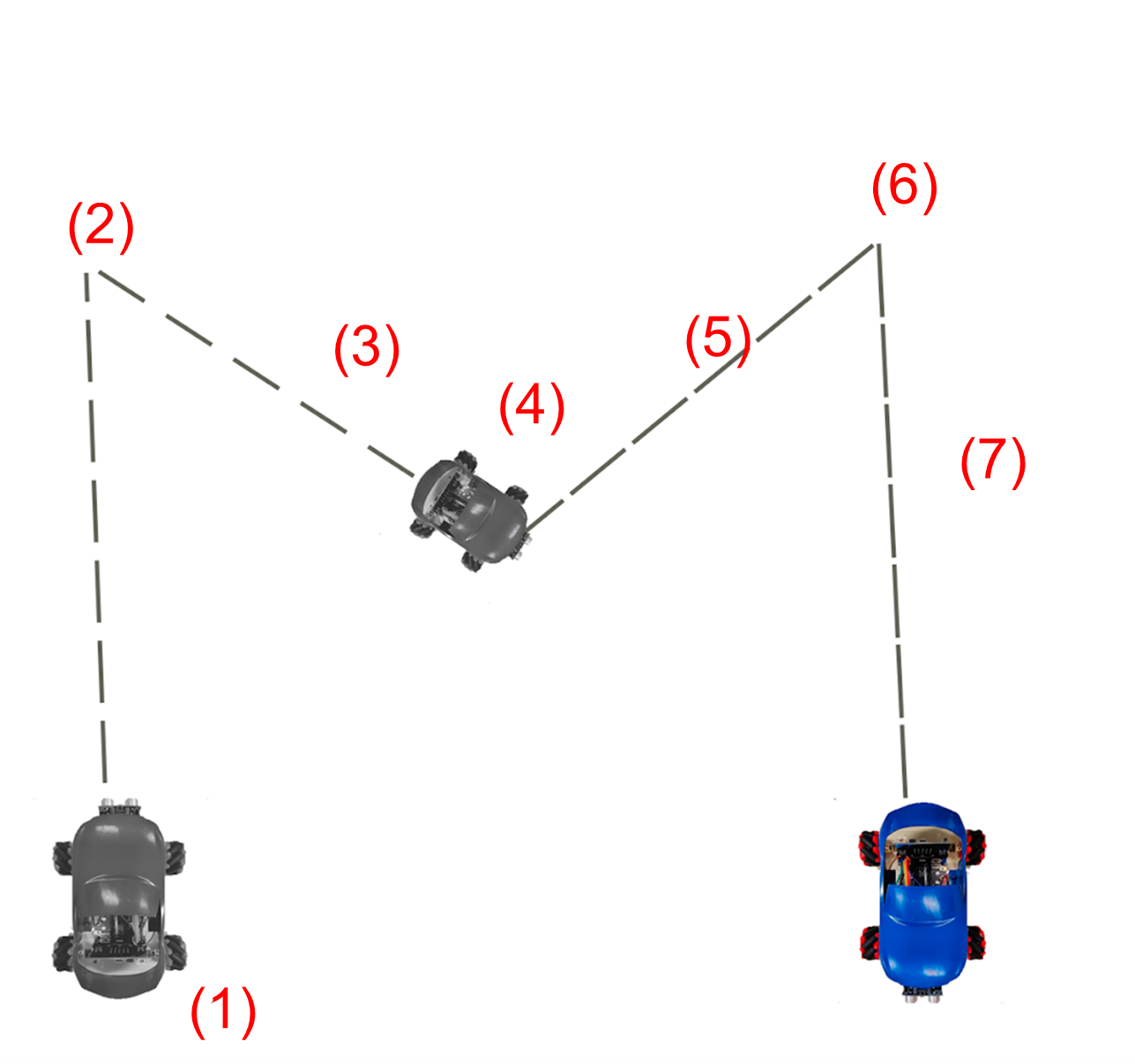
4.5.3. M shape route driving:¶
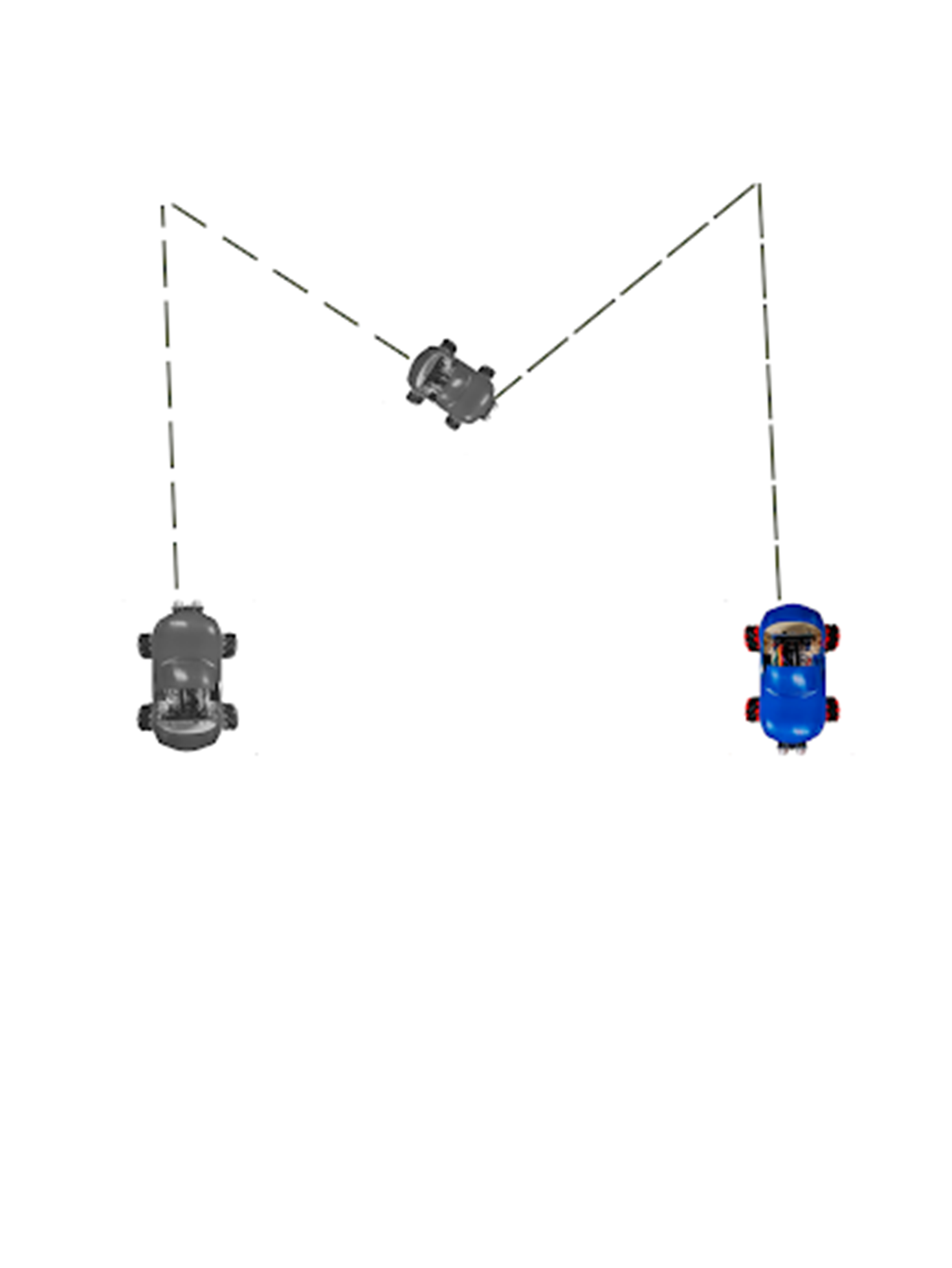
Hint:The rotating angle is related to the rotating second of the car.
4.6. Answer¶
4.6.1. Exercise 1:¶
If 2 diagonal pairs of wheels are set to different rotating direction, the car will be able to move horizontally.
Setting the speed of “M2” and “M3” to 100, “M1” and “M4” to -100,the car will move to the left horizontally.

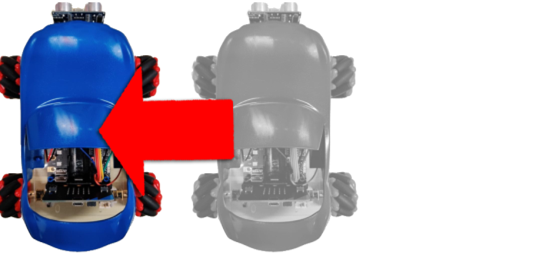
Vice versa, speed of “M1” and “M4” set to 100, “M2”and “M3” set to -100,the car will move to the right horizontally.

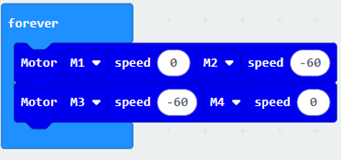
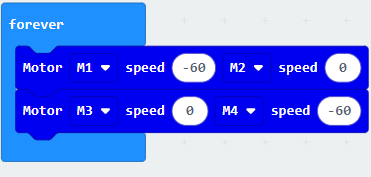
4.6.2. Exercise 2:¶



4.6.3. Exercise 3:¶
Moving around in a square:¶
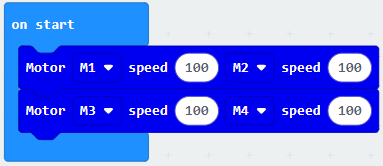
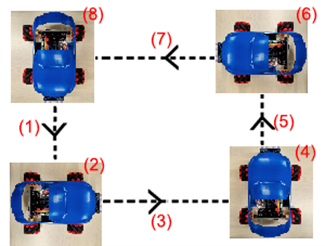
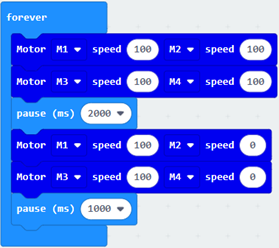
(1) changing all the speed of the motors to 100 and ‘stop’ 2000 milliseconds,the car will move straight ahead for 2 second。
(2) And then set the speed of “M2” and ”M4“to 0,“M1”and “M3” keep at 100,and ‘stop’ for 1000 millisecond,the car will rotate to right for 1 second (about -90 degree,and will vary for different car)。
(3 - 8)repeat step 1 – 2 for 3 times,and the car will moving around in a square。
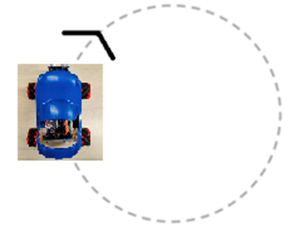
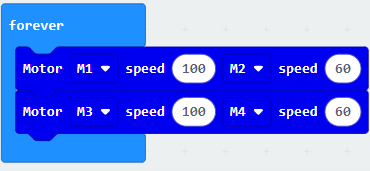
Moving around in a circle:¶
Setting the speed of “M1”and” M3“to be 100, “M2”and” M4“to be 60(setting the speed of “M1”and ”M3“lower and greater than 0, and will vary for different car)repeat infinitely, and the car will move around in a circle
M shape route driving:¶
Separate the program into two types (forward, rotating)
Attention! (2) and (6) rotate for 2.5 second. Comparing (2) and (6) to (4), (4) has a larger rotating angle
** The rotating angle is related to the rotating second of the car, the second it takes will vary for different car **