3. 第三課¶

3.1. 簡介¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
3.2. 教學目標¶
讓學生清楚掌握Micro:bit 智能小車的麥克納姆輪的移動原理,並了解如何利用控制馬達控制小車左右或前後移動。
3.3. 認識麥克納姆輪¶
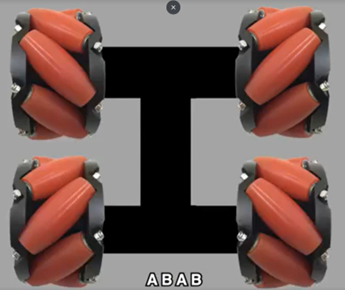
麥克納姆輪由多個滾軸所組成,而滾軸的分佈將車輪分成兩對。對角的車輪有相同的滾軸分佈。
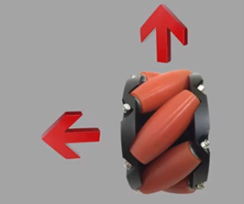
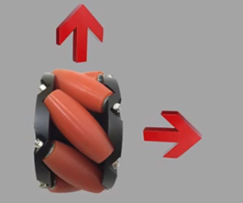
當車輪轉動時,滾軸會帶動車輪往向水平方向移動。而另一個方向的滾輪會帶動車輪到另一則。
4個麥克納姆輪會接駁到4個不同的馬達,而4個車輪不同的轉動方向決定車子的移動方向。
3.4. 車輪的原理¶
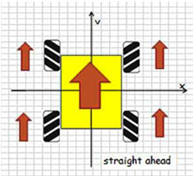
1. 4個車輪向前,車子將會向前移動。
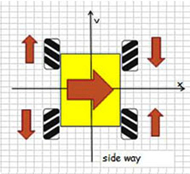
2. 2組對角的車輪相反轉動,車子將會向左右平移。
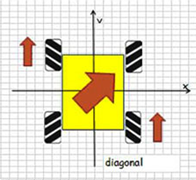
3. 只有1組對角的車輪轉動,車子將會向斜角移動。
4. 只有1邊 (左或右) 的車輪轉動,車子會向另一方轉。
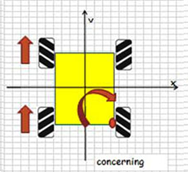
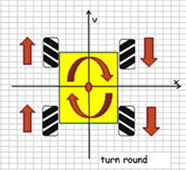
5. 2邊 (左和右) 的車輪轉動方向相反,車子會原地自轉。
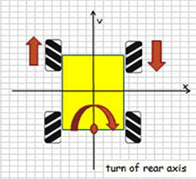
6. 2邊 (左和右) 前面的車輪轉動方向相反,車子會以車尾為中心自轉。