5. 第五至六課¶

5.1. 簡介:¶
歡迎參加Micro:bit 智能小車課程!在本課程中,我們將探索Micro:bit並學習如何在編程中如何控制Micro:bit智能小車。
5.2. 教學目標:¶
讓學生清楚掌握Micro:bit 智能小車的超聲波傳感器的原理及其功用,並了解超聲波傳感器的測距/避障功能。
5.3. 超聲波避障¶
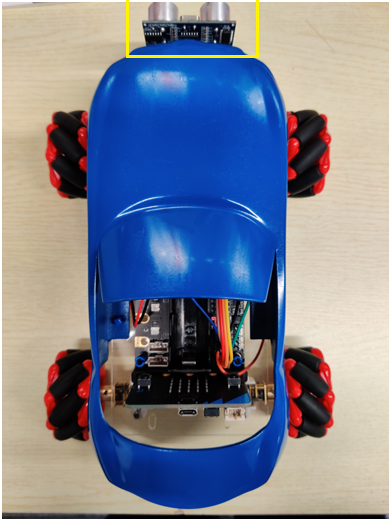
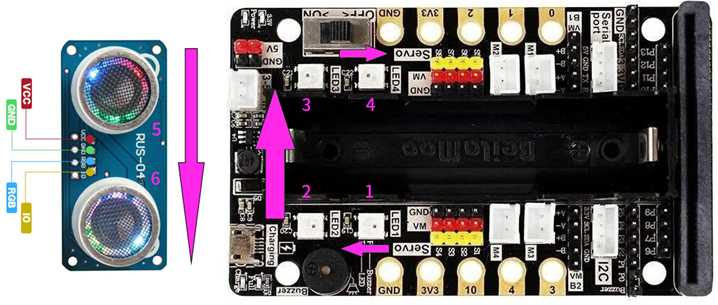
超聲波傳感器位於車子的正前方, 而超聲波傳感器只能探測正前方的障礙物。
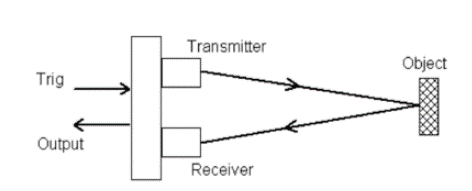
5.3.1. 超聲波模塊的原理¶
超聲波模塊不受光線所影響,正如蝙蝠一樣,他們幾乎盲但仍能在黑暗中閃避障礙物。
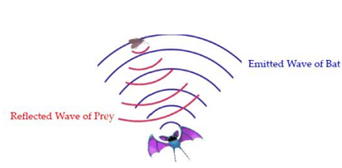
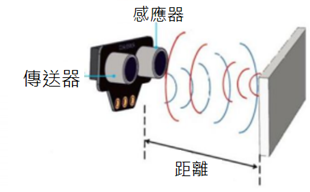
超聲波模塊透過發射一段超聲波往前方,當該超聲波接觸到物件後會反彈,然後感應器接收該超聲波。而發射及接收到信號之間的時間會用作計算距離。
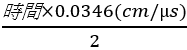
5.3.2. 計算公式如下:¶
距離 (cm) =
小車的七彩(RGB)燈,可以在程序中控制顏色,但每種顏色需要在程序中先下定義,沒有定義的顏色不能在七彩燈中顯示。
這模組有效的探測距離為2~400cm
5.4. Stemhub:bit 超聲波¶
在Stemhub:bit > 超聲波(Ultrasonic)中,有三個主要的模組:
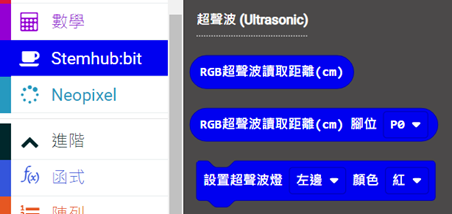
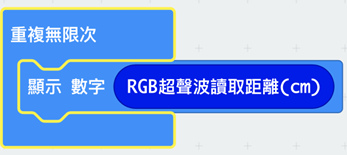
輸出會是利用超聲波讀取的距離(默認腳位:P2)(輸出:數字)

功能與上面一樣,但自定腳位
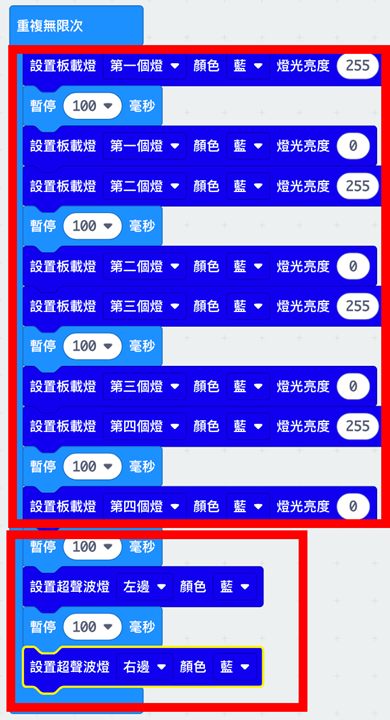
設置超聲波燈(左或右)和顏色(紅、橙、黃、綠、藍...)



5.7. 練習3: 設計程式把超聲波讀取的距離轉換成歌曲,並顯示不同顔色的燈¶
提示1:自行定義不同距離代表的音效和顔色
提示2:每次播放音效後,需要短暫停止以防Micro:bit板故障
(可先以中音CDEFG音及紅橙黃綠藍色作嘗試)


5.14. 答案¶



5.14.5. 練習5:¶
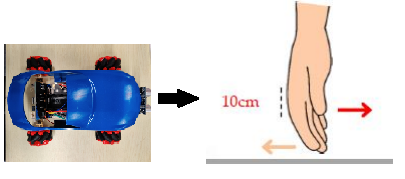
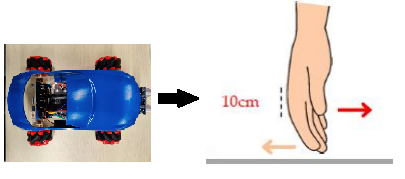
設計程序使小車跟著手掌移動並保持在的10cm的距離。
程式分為三個部分:
1. 如果障礙物(手)和車子距離超過10cm,車子會繼續直行
2. 如果障礙物(手)和車子距離少於10cm,車子會倒退
3. 如果障礙物(手)和車子距離等於10cm,車子會暫停,以免距離過多或少

5.14.6. 練習6:¶

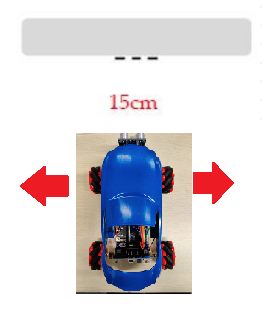
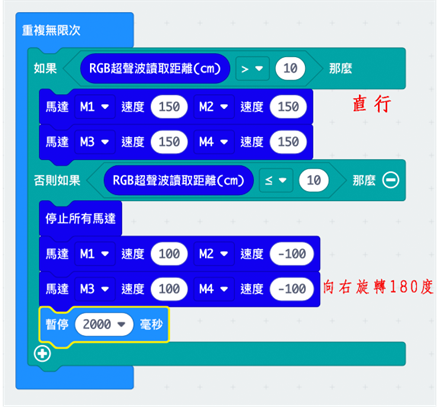
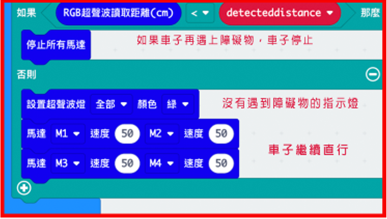
設計程序使小車遇到障礙物時,小車會180度調頭。
如果車子沒有遇到障礙物(障礙物距離超過10cm便假設前面暫時沒有障礙物),車子會一直直行
如果車子遇到了障礙物(10cm或10cm內),停止行動,然後向右旋轉180度
(**旋轉角度與旋轉的時間有關**)
5.14.7. 練習 7:¶
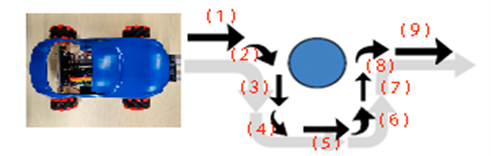
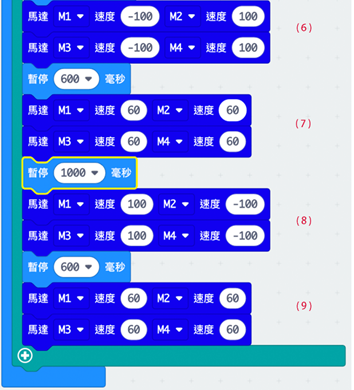
設計程序使小車遇到障礙物時,會向右避開障礙物然後前進
**小車會直行5次,拐右2次和拐左2次**
小車路線:直行,拐右,直行,拐左,直行,拐左,直行,拐右
**秒數可因車而異**
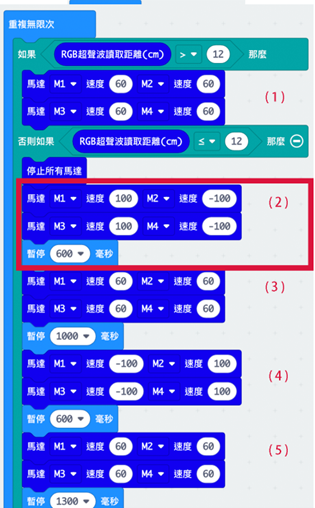
5.14.8. 練習 8:¶
首先設置感應距離為12
整個程式分為三大個部分(遇到障礙物轉左,遇到障礙物轉右,繼續往前)
**留意如果...否則的用法,如果符合不到如果的條件,便會到否則的模組的條件裡。**

5.14.9. 附錄:¶
Micro:bit本來不具備Stemhub:bit中的超聲波積木模塊,操作超聲波傳感器需要使用引腳積木模塊進行編程.
寫入數位信號(0 或 1)至引腳。


1是啓動引腳,開始發射信號。
0是關閉引腳,停止發射信號。
計算發射及接收到信號之間的時間。


5.15. 超聲波傳感器測距編程¶
(1)先初始化引腳的數字為0,等待2微秒。
(2)寫入信號1至引腳,開始發射超聲波,等待10微秒。
(3)寫入信號0至引腳,停止發射超聲波。
(4)建立變數“距離”並設爲引腳P14發射及接收到信號之間的時間除以58,測量出障礙物的距離。
(5)將距離顯示在Micro:bit的屏幕上。
(6)最後將程序設置為函式。
