9. Crosswalk¶
9.1. Goal¶
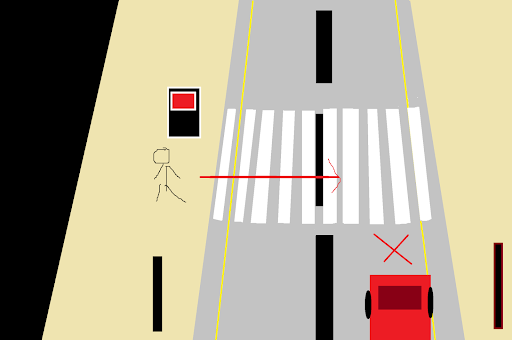
Make a smart crosswalk system. When a pedestrian is detected crossing the road, within five seconds, if a car passes by, the car will be controlled to stop and let the pedestrian cross the road first.
9.2. Background¶
9.2.1. What is a smart crosswalk system?¶
Smart crosswalk system is used to maintain normal operation of the crosswalk. When a person comes near the crosswalk and wants to cross the road, the cars coming through will automatically stop and let the pedestrians go first. Otherwise, the cars will keep going.
9.2.2. Smart crosswalk system operation¶
9.3. Part List¶
Microbit (1)
Expansion board (1)
Distance sensor (1)
obstacle Infrared avoidance sensor (1)
Female To Female Dupont Cable Jumper Wire Dupont Line (7)
M3*8mm screw (1)
M2*8mm screw(4)
M2 nut (1)
M2 nut (4)
Screwdriver(1)
Module B (1)
Module E(1)
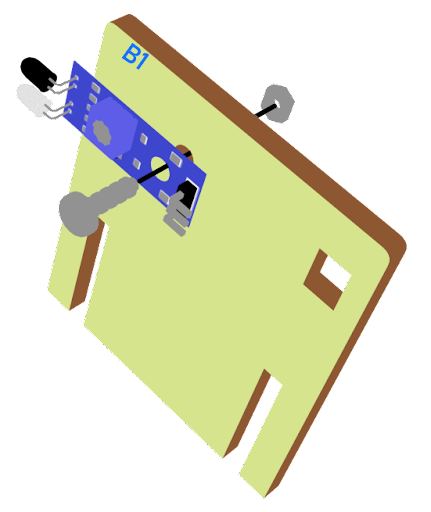
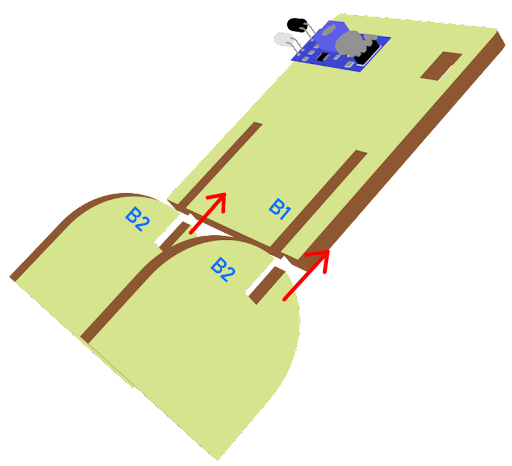
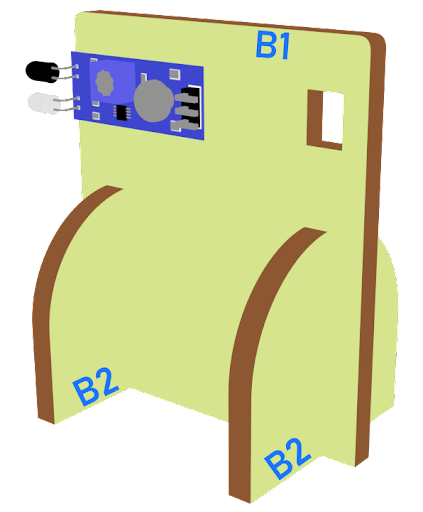
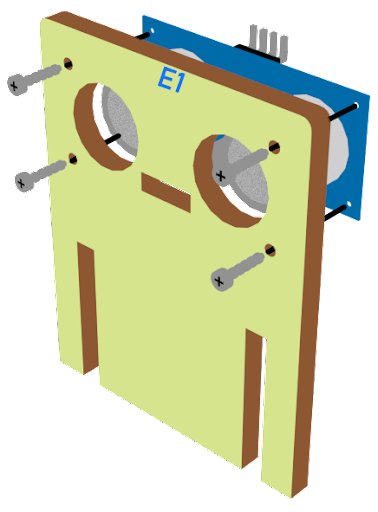
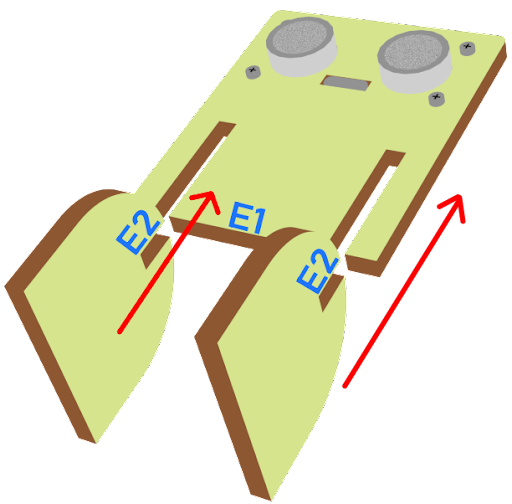
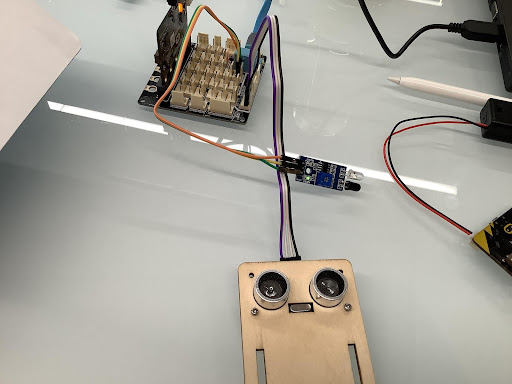
9.4. Assembly step¶
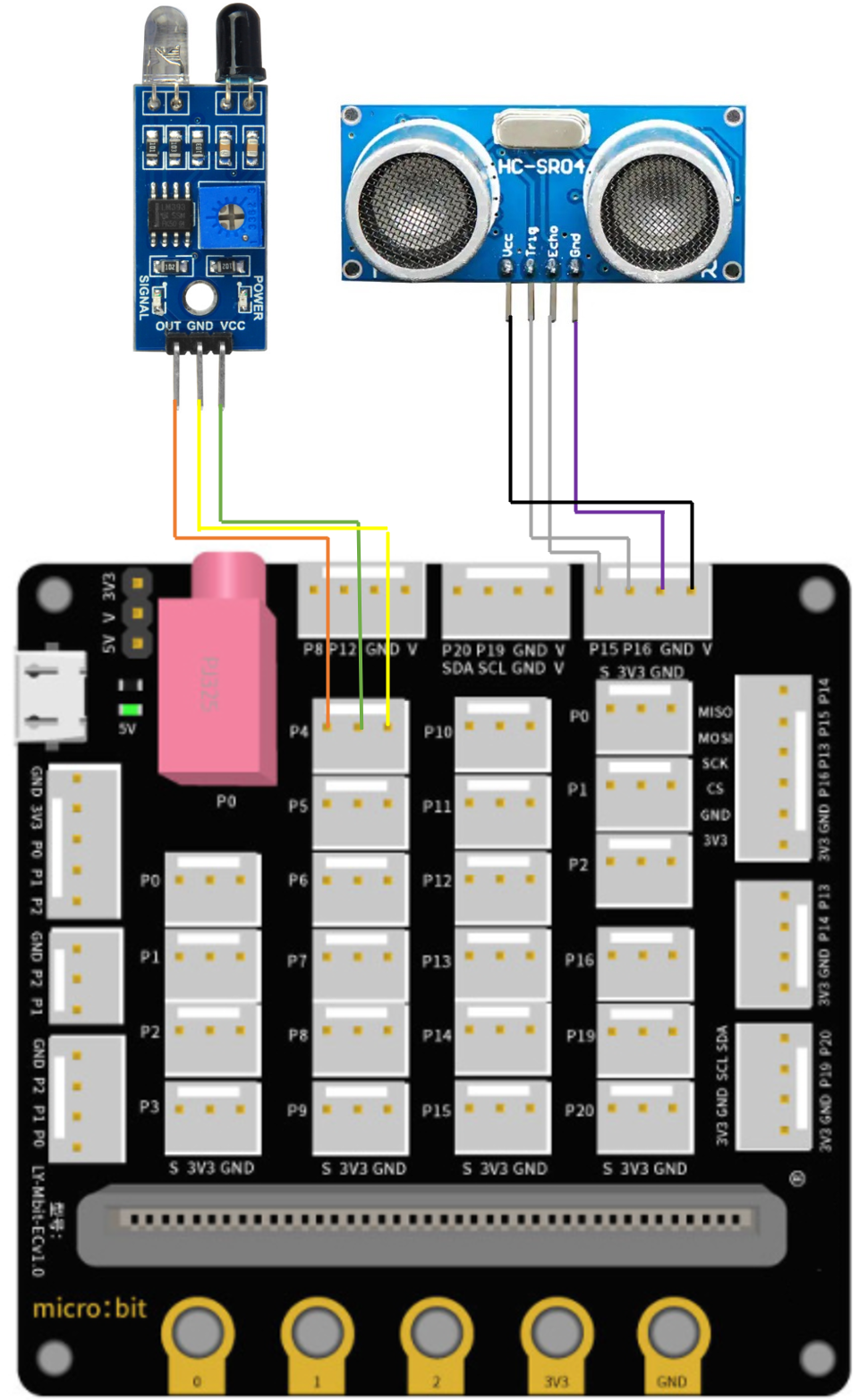
9.5. Hardware connect¶
Microbit 1:
Connect obstacle Infrared avoidance sensor to P4 port Connect the Distance Sensor to P15 (trig)/ P16 (echo) port
Microbit2:
car
9.6. Programming (MakeCode)¶
9.6.1. Sender:¶
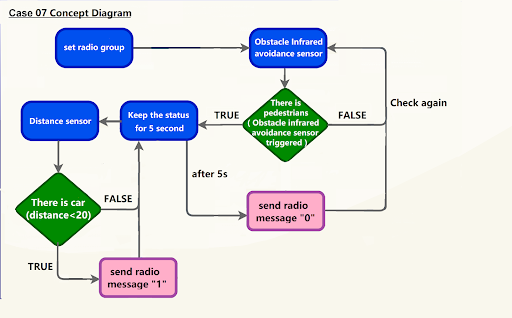
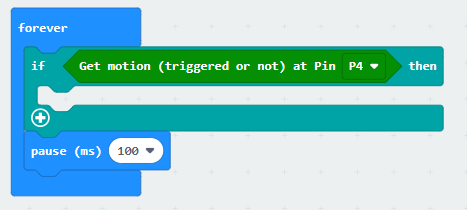
9.6.3. Step 2. When trigger a motion¶
Snap if statement into forever, set get motion (triggered or not) at pin P4
Snap pause to the loop to wait for 0.1 second for next checking
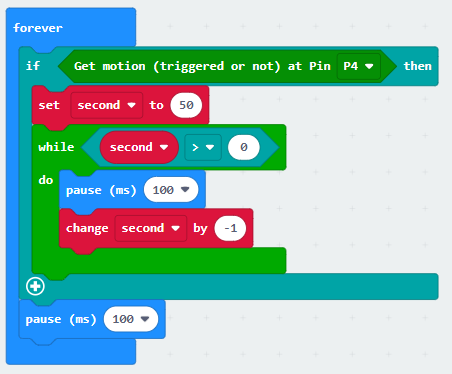
9.6.4. Step 3. Keep the status for 5 second¶
set variable second to 50
While second > 0, snap pause to 0.1 second and change second by -1.
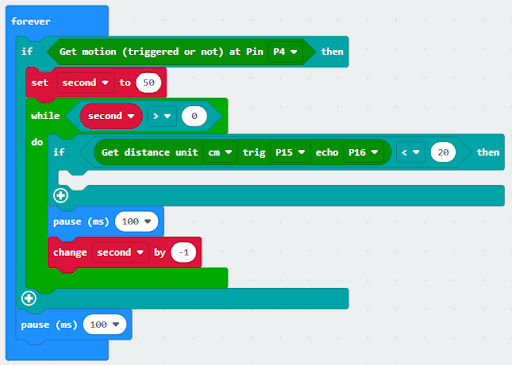
9.6.5. Step 4. Get distance value¶
Snap if statement into while loop, set get distance unit cm trig P15 echo P16 < 20
9.6.6. Step 5. Control the car by sending radio number發送廣播數字以控制車輛¶
Drag radio send number to 1 into if 將廣播發送數字1拖入 if 句式
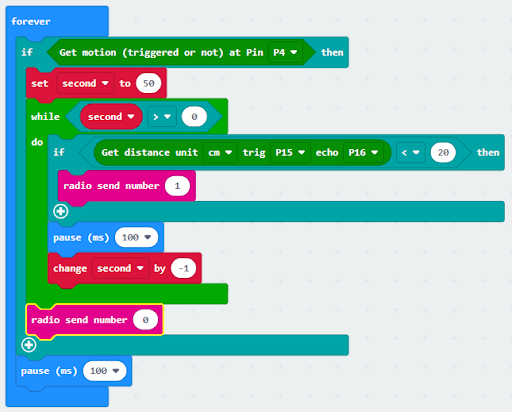
Full solution:
https://makecode.microbit.org/_hyo2D4FRJ7qM
9.6.7. Receiver:¶
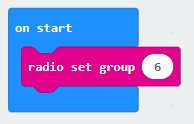
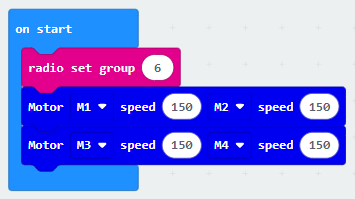
9.6.8. Step 1. Set radio set group at start position¶
Drag radio set group 6 to on start
Initially, the car moves forward by default
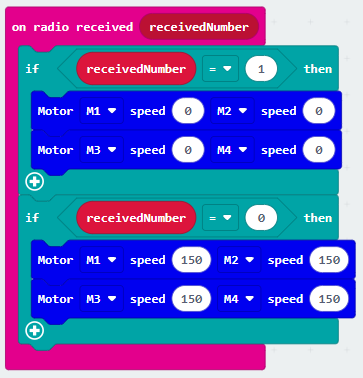
9.6.9. Step 2. Control car by receiving different number¶
Snap if statement into on radio received receivedNumber
Set receivedNumber =1 and make the car stop
Set receivedNumber=0 and make the car move forward
Full solution:
https://makecode.microbit.org/_4hW5yAXg8f5T
https://makecode.microbit.org/_1o1iRhg3qfRF
9.7. Result¶
Distance sensor is used to detect whether there are cars passing by. Obstacle Infrared avoidance sensor is used to sense whether there are pedestrians crossing the crosswalk. When the Infrared sensor is triggered (i.e., pedestrian crossing the road), it sends a signal to the passing cars to alert them to stop and let the pedestrians cross first.
9.8. Think¶
Q1: What will the program be like when there are pedestrians crossing from the other side of the crosswalk?