9. 智能交通燈¶
9.1. 目標¶
在上一課的基礎下,製作智能交通燈。會在刹車前及恢復正常行駛前,控制交通燈的燈光轉換,讓方便司機了解道路狀態。

9.3. 材料準備¶
Microbit (1)
Expansion board 擴展板(1)
Distance sensor(1)
Obstacle Infrared avoidance sensor 紅外路障傳感器 (1)
Traffic light 交通燈 (1)
4-pin module wire PH2.0轉杜邦綫4P(1)
母對母杜邦綫 Female To Female Dupont Cable Jumper Wire Dupont Line (7)
M3*8mm screw (1)
M2*8mm screw (4)
M3 nut (1)
M2 nut (4)
螺絲批(1)
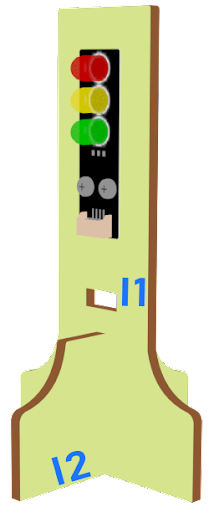
Module B (1)
Module E (1)
Module I(1)
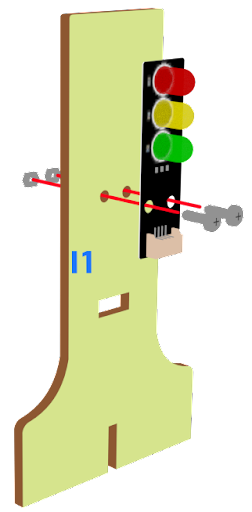
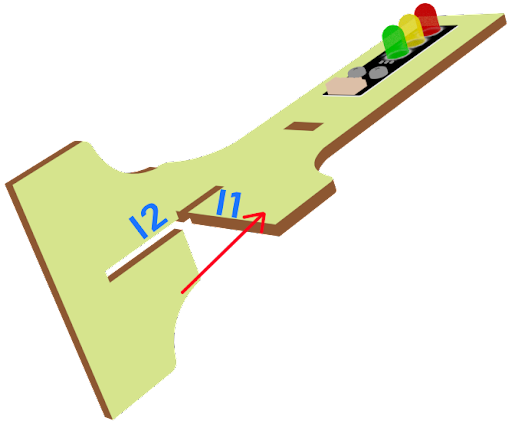
9.4. 組裝步驟¶
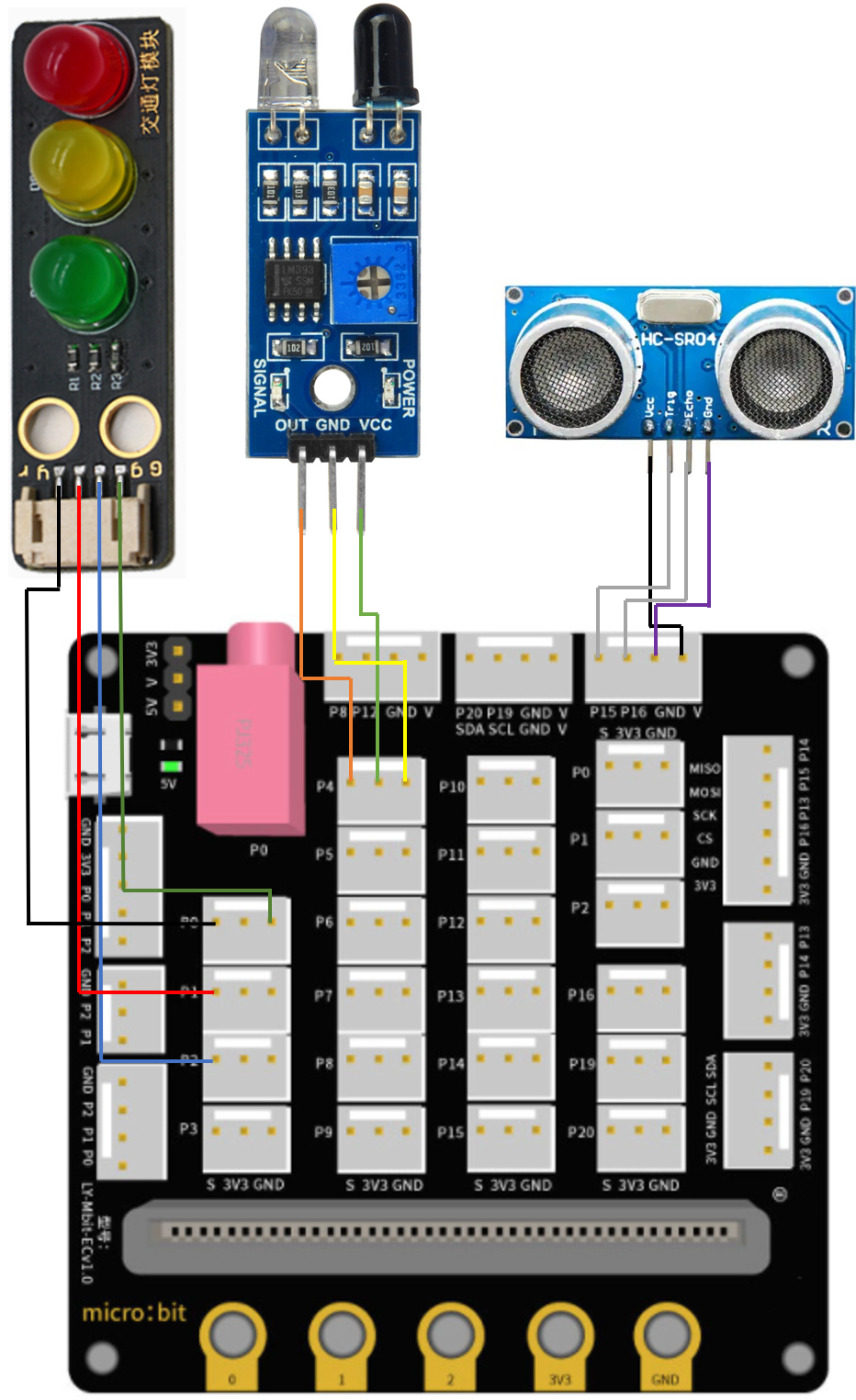
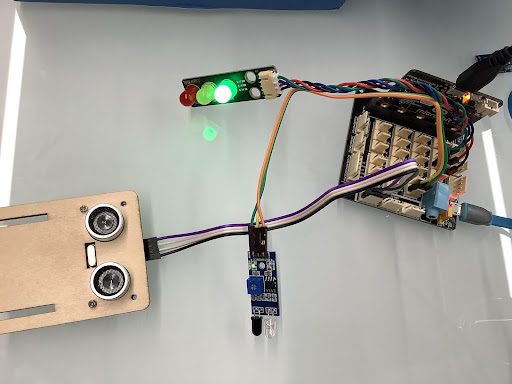
9.5. 硬件連接¶
Microbit 1:
將交通LED模塊連接到 P1 P2 P3埠。
將紅外路障傳感器連接到P4端口。
將距離傳感器連接到P14(Trig)/P15(echo)端口。
Microbit2:
Car
9.6. 編程¶
9.6.1. Sender:¶
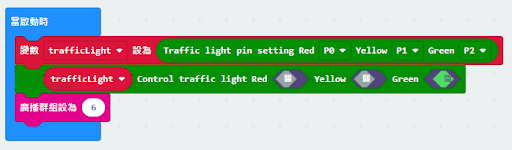
9.6.5. 像上一課一樣初始化程序¶
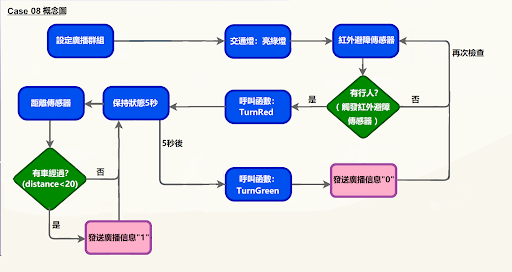
將 trafficLight to Traffic light pin setting Red P0 Yellow P1 Green P2 拖入 當啓動時
控制綠色交通燈亮起
將廣播群組設爲6拖入當啓動時
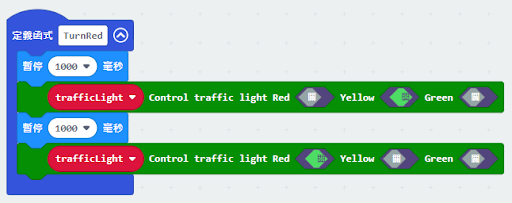
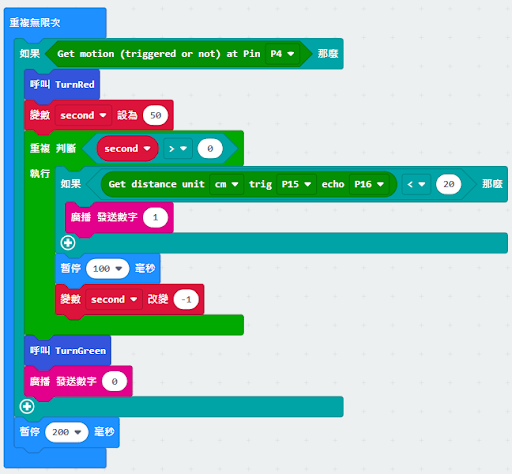
9.6.6. 呼叫函數¶
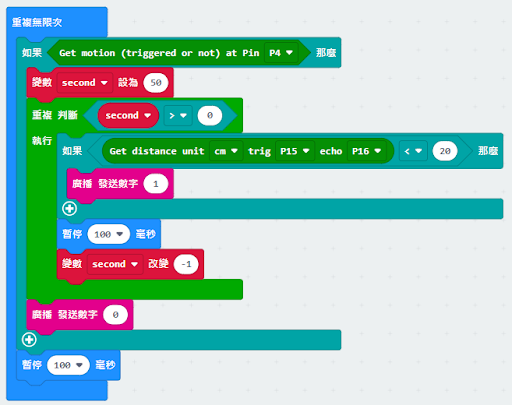
將呼叫TurnRed拖入get motion (triggered or not) at pin P4的如果句式中
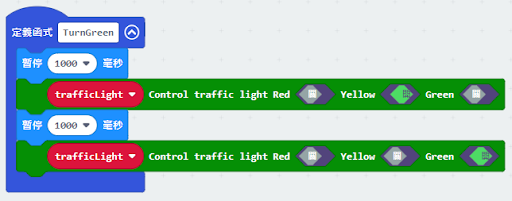
將呼叫TurnGreen 拖到循環后
Full solution
https://makecode.microbit.org/_XEKU87ijgFY2
9.6.7. Receiver:¶

9.6.9. 通過接收不同數字來控制車輛¶
將如果語句放入當收到廣播數字 receivedNumber
設receivedNumber =1,並控制刹車。
設receivedNumber=0,並讓車向前移動。

Full solution:
https://makecode.microbit.org/_4hW5yAXg8f5T
https://makecode.microbit.org/_1o1iRhg3qfRF
9.7. 總結¶
在上一課的基礎下,增加一個紅綠燈模塊,當感應到有行人經過時,會先轉紅燈,再控制車輛刹車。之後,行人過完馬路,再控制交通燈轉綠燈及使車輛繼續向前行駛。
9.8. 思考¶
我們怎樣才能根據相應的顏色為交通LED模塊添加聲音效果?