8. 斑馬綫¶
8.2. 背景¶
8.2.1. 什麽是智能斑馬綫系統?¶
智能斑馬綫系統是用作管理斑馬綫附近的車輛控制。當有行人需要過馬路,車輛應該停車,讓行人優先通過。這樣一方面提高了斑馬綫的使用率也確保了行人的安全。
8.2.2. 智能斑馬綫運作¶
8.3. 材料準備¶
Microbit (1)
Expansion board 擴展板 (1)
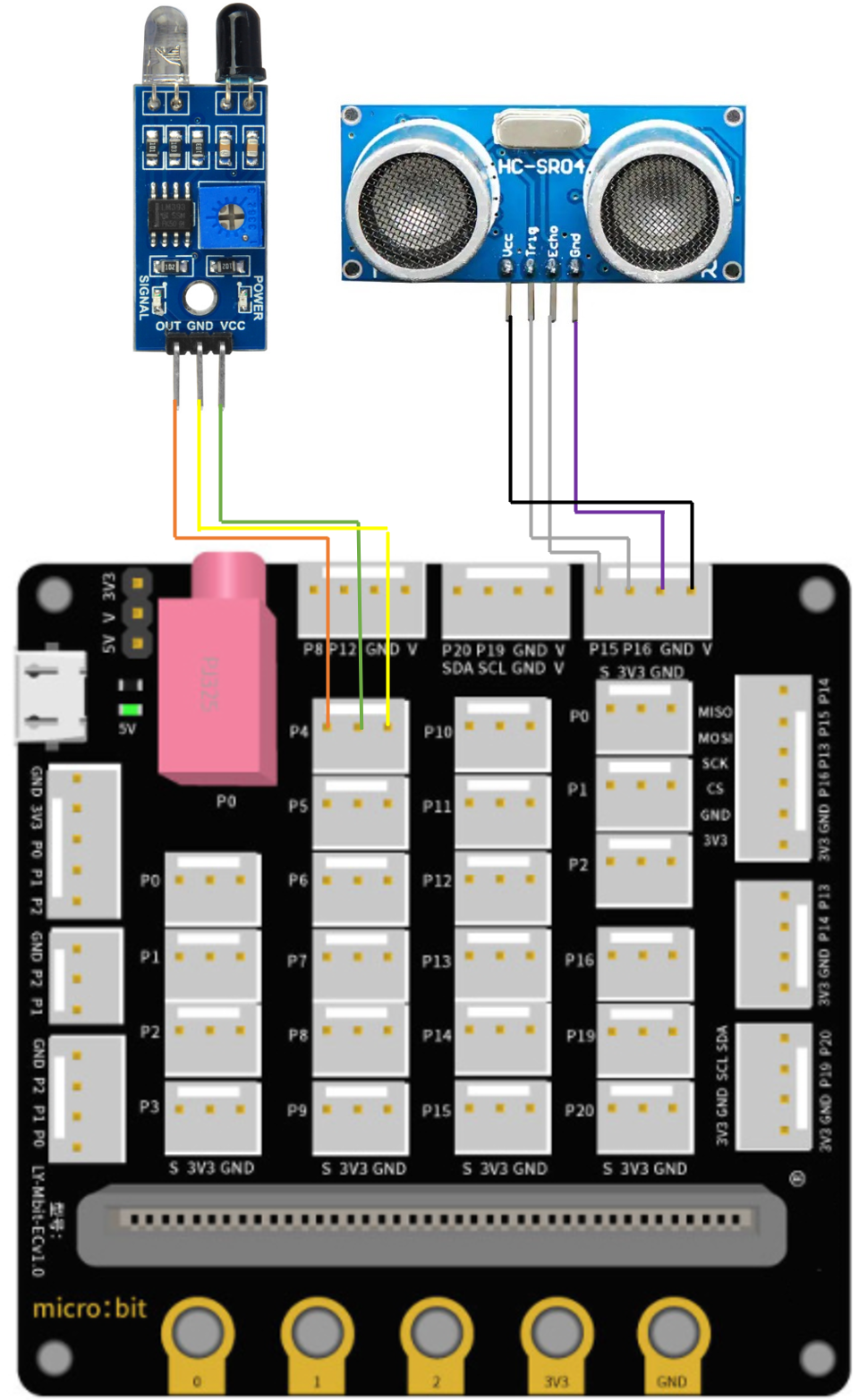
Distance sensor 距離傳感器(1)
obstacle Infrared avoidance sensor 紅外路障傳感器(1)
母對母杜邦綫 Female To Female Dupont Cable Jumper Wire Dupont Line (7)
M3*8mm screw (1)
M2*8mm screw(4)
M2 nut (1)
M2 nut (4)
螺絲批(1)
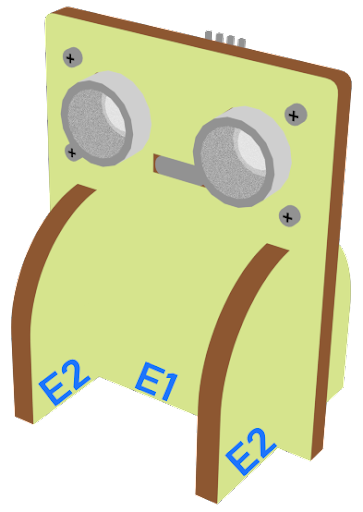
Module B (1)
Module E(1)
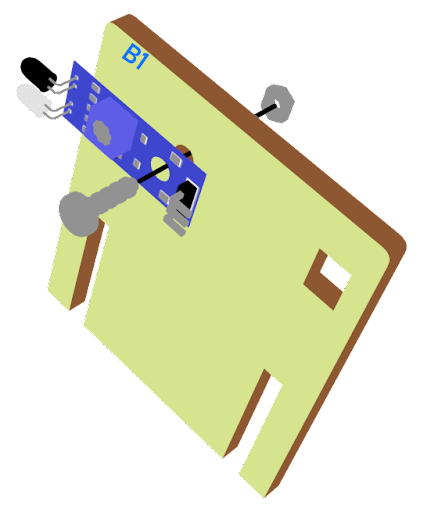
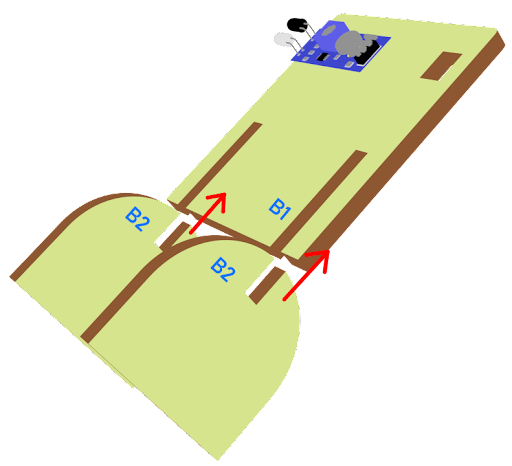
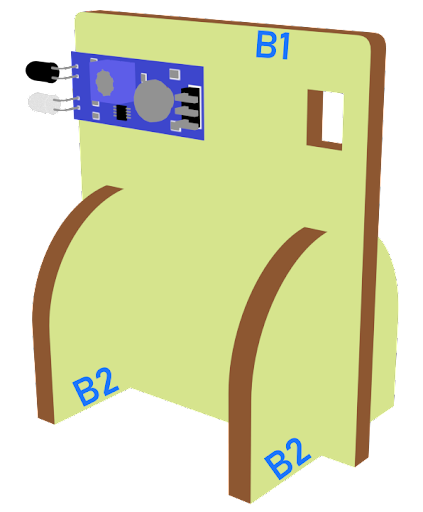
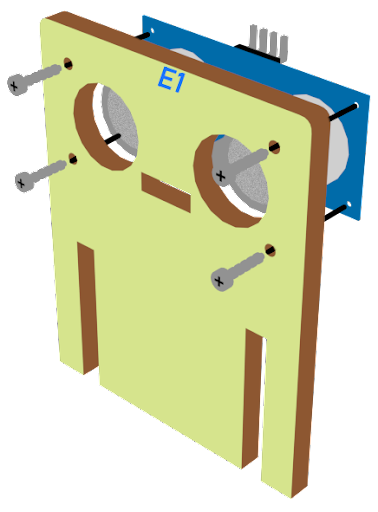
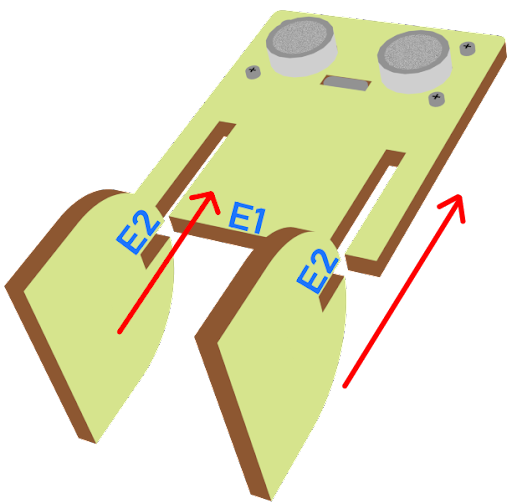
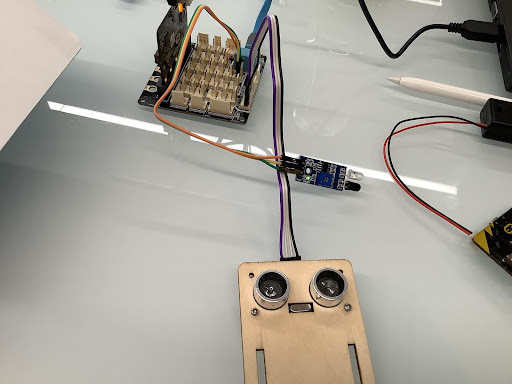
8.4. 組裝步驟¶
8.6. 編程¶
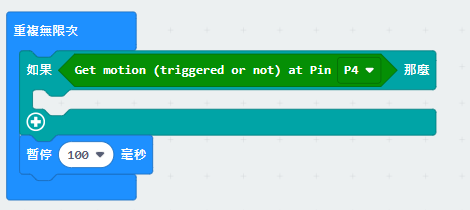
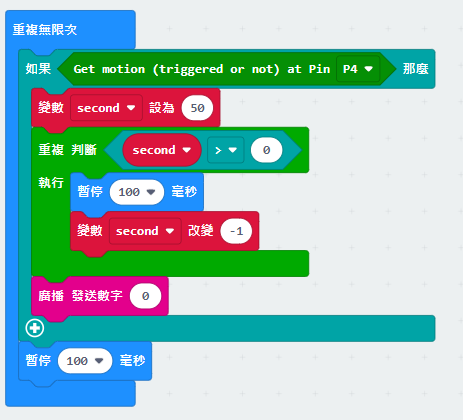
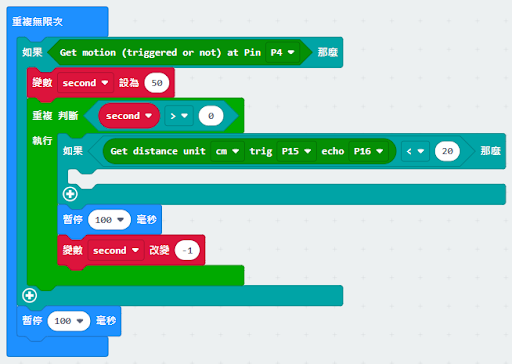
8.6.1. Sender:¶
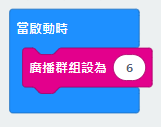
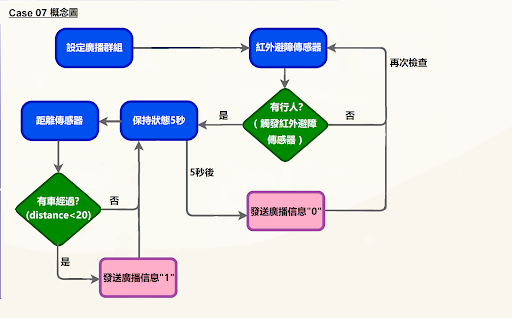
8.6.6. 發送廣播數字以控制車輛¶
將廣播發送數字1拖入 if 句式
將廣播發送數字0拖到循環外
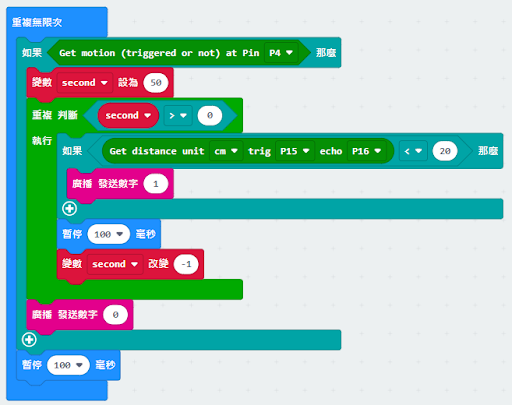
Full solution:
https://makecode.microbit.org/_hyo2D4FRJ7qM
8.6.7. Receiver:¶

8.6.9. 通過接收不同數字來控制車輛¶
將如果語句放入當收到廣播數字 receivedNumber
設receivedNumber =1,並控制刹車。
設receivedNumber=0,並讓車向前移動。

Full solution:
https://makecode.microbit.org/_4hW5yAXg8f5T
https://makecode.microbit.org/_1o1iRhg3qfRF
8.7. 總結¶
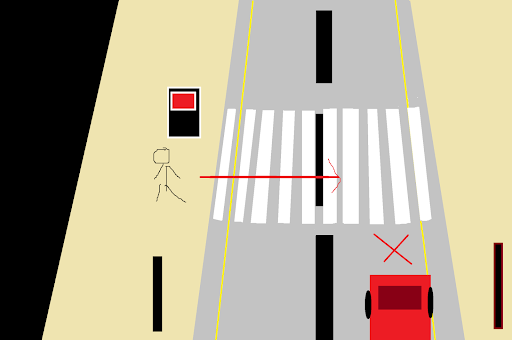
距離傳感器是用作感應是否有車輛經過。紅外障礙傳感器是用作感應是否有行人要過斑馬綫。當紅外障礙傳感器被觸發(即有行人要過斑馬綫)時,會向經過的車輛發送信號,告知它們要停車,讓行人先過馬路。
8.8. 思考¶
如果斑馬綫的另一邊也有行人要過馬路,新的程式將會是怎麽的?