5. 智能停車場障礙一:車位監測¶
5.1. 目標¶
製作一個停車場監控系統以檢測停車場是否有空置車位,並用多彩LED及OLED顯示空置情況及空置車位數量。
5.2. 背景¶
5.2.1. 什麽是智能停車場監控系統?¶
智能停車場監控系統可以使人們生活得更方便。它減少了停車場管理方面的人力。人們可以直接通過OLED了解車位的空置情況。
5.2.2. 智能停車場監控系統運作¶
5.3. 材料準備¶
Microbit (1)
Expansion board 擴展板(1)
Distance sensor 距離傳感器 (1)
multi-color LED 全彩LED (1)
OLED (1)
母對母杜邦綫 Female To Female Dupont Cable Jumper Wire Dupont Line (12)
M2*8mm screw (10)
M2 nut (10)
螺絲批(1)
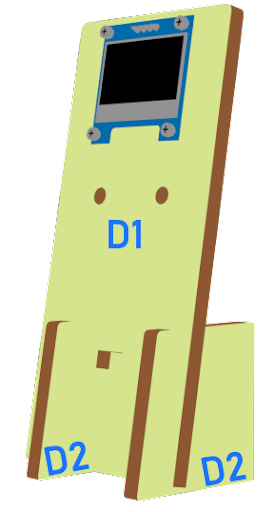
Module D (1)
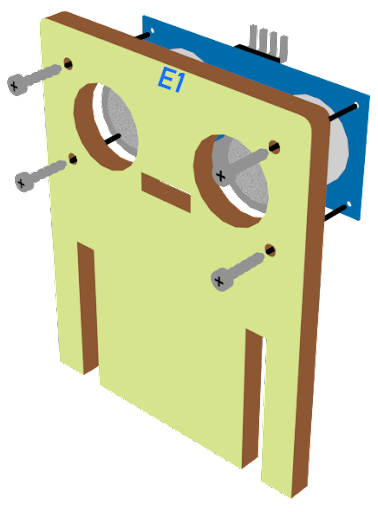
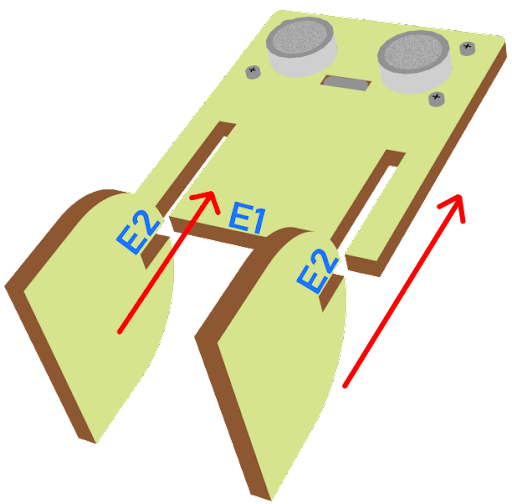
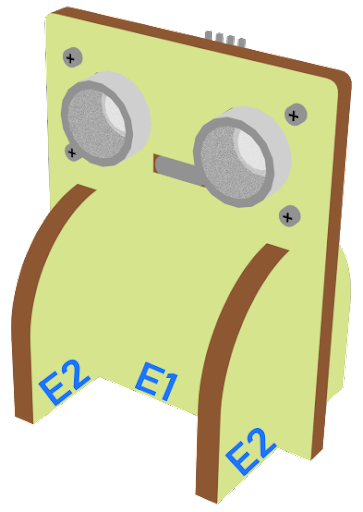
Module E (1)
Module G (1)
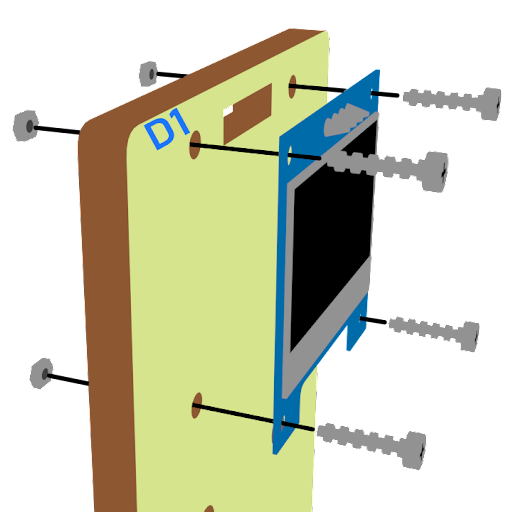
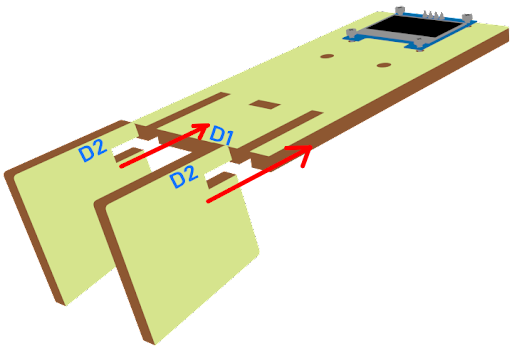
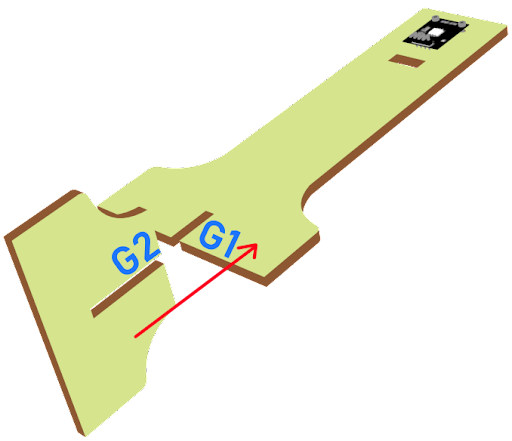
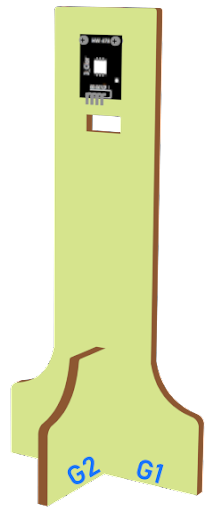
5.4. 組裝步驟¶
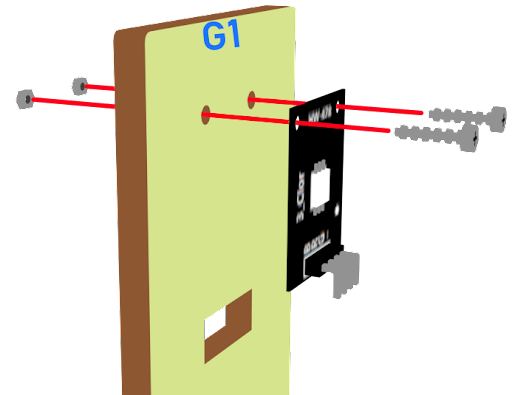
5.5. 硬件連接¶
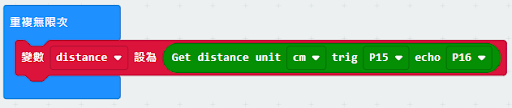
將距離傳感器連接到P14(Trig)/P15(echo)端口。
將全彩LED連接到P0 P1 P2端口
將OLED的連接延伸到I2C連接埠
5.6. 編程¶
5.6.1. 在起始位置設置變量並初始化多色LED及OLED屏幕¶
拖動OLED初始化寬:128高:64,至當啟動時。
在當啟動時中,從變數中拖入變數distance設為0,變數number設為0。
拖入set colorLED to color led pin setting …。

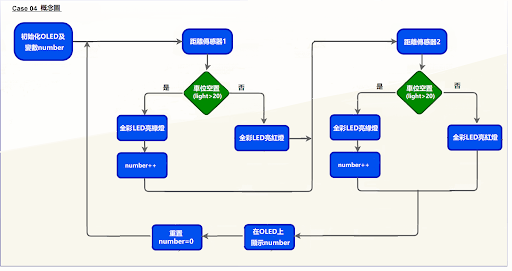
5.6.3. 顯示指示色及計算空置車位數量¶
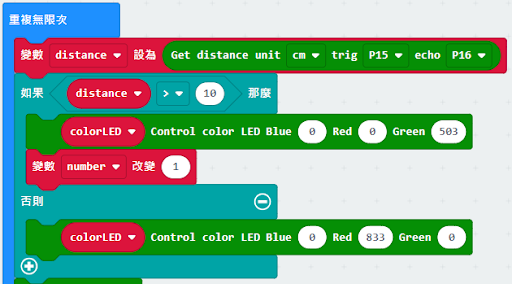
將如果語句放入重複無數次 ,設變數distance>10
如果distance>10,則顯示綠色,否則顯示紅色。
如果distance>10,變數number設為1
5.6.4. 在OLED上顯示空置車位數量¶
從OLED中拖出清除OLED顯示,以避免重疊。
拖出新行數字並顯示變數number的值。
把暫停拖入循環,為下一次檢查等待1秒。
重置number至0以開始新的檢查。

Full Solution
MakeCode: https://makecode.microbit.org/_e7bDyaMcDCsJ
5.7. 總結¶
距離傳感器是用來檢查停車場的空位。當有空置車位時,全彩LED會顯示綠色。否則,它會顯示紅色。空置車位的數量將會顯示在OLED上。