11. 十字路口¶
11.1. 目標¶
打造智能紅綠燈系統,根據道路交通情況,在不同路口紅綠燈之間自動切換紅綠燈。
11.3. 材料準備¶
Microbit (1)
Expansion board 擴展板 (1)
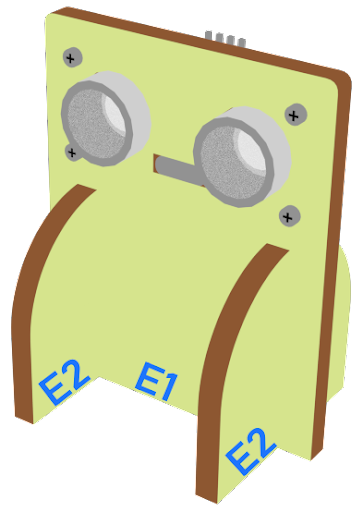
Distance sensor 距離傳感器(2)
Traffic light 交通燈 (2)
4-pin module wire PH2.0轉杜邦綫4P(2)
母對母杜邦綫 Female To Female Dupont Cable Jumper Wire Dupont Line (8)
M2*8mm screw (8)
M3*8mm screw (4)
M2 nut (8)
M3 nut (4)
螺絲批
Module E (2)
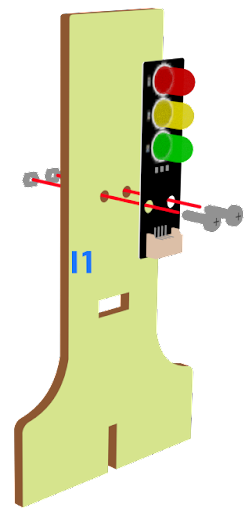
Module I(2)
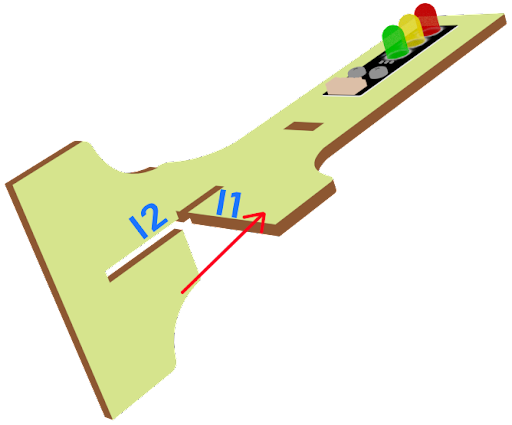
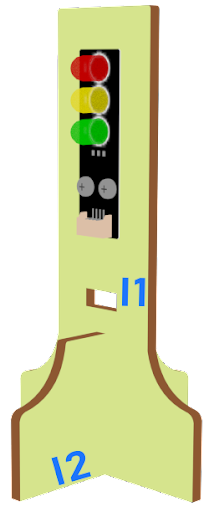
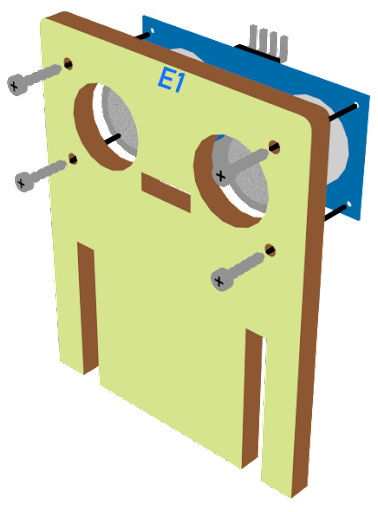
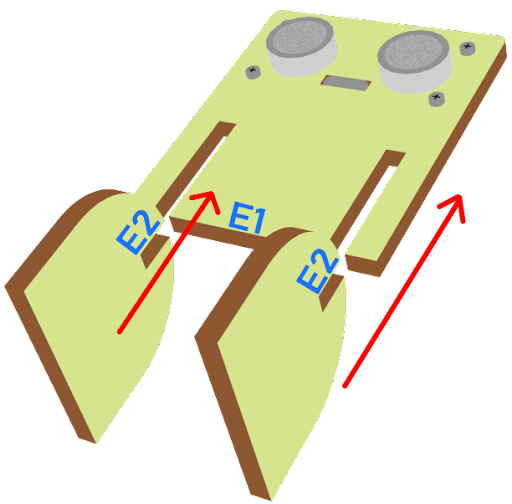
11.4. 組裝步驟¶
11.5. 硬件連接¶
Microbit 1:
將交通LED模塊連接到P0 P1 P2埠。
將距離傳感器連接到P14(Trig)/P15(echo)端口。
Microbit2:
將交通LED模塊連接到P0 P1 P2埠。
將距離傳感器連接到P14(Trig)/P15(echo)端口。
Microbit 3:
Car
Microbit4:
Car
11.6. 編程¶
11.6.1. Traffic light 1:¶
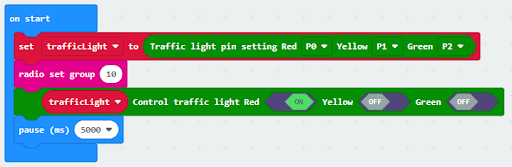
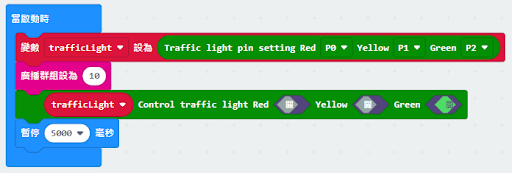
11.6.4. 初始化程式¶
將 trafficLight to Traffic light pin setting Red P0 Yellow P1 Green P2 拖入 當啓動時
將廣播群組設爲10拖入當啓動時
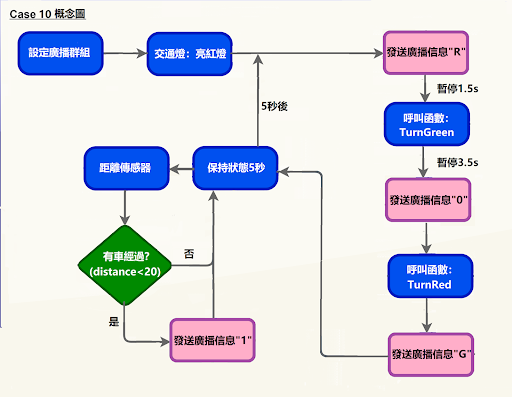
控制交通燈亮紅燈
暫停5秒


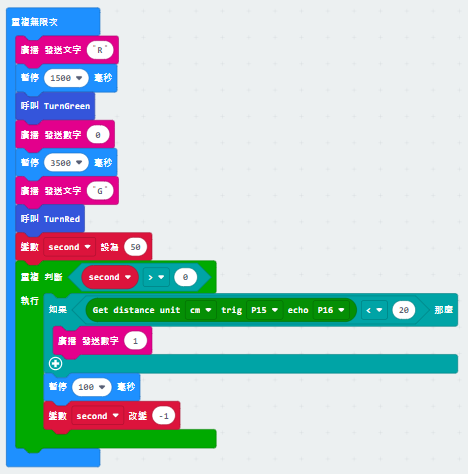
11.6.8. 發送廣播數字以控制交通燈及車輛¶
將廣播發送數字1拖入 if 句式
將廣播發送數字0拖到TurnGreen後
將廣播發送字串“R”拖到TurnGreen前
將廣播發送字串“G”拖到TurnRed前
Full solution:
https://makecode.microbit.org/_Pm2eWtRwERU8
11.6.9. Traffic light 2:¶
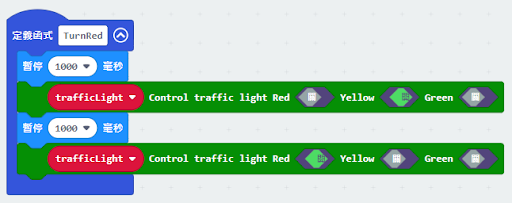
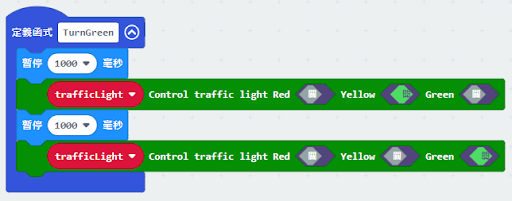
11.6.10. 設置新的功能。¶

11.6.11. 初始化程序¶
將 trafficLight to Traffic light pin setting Red P0 Yellow P1 Green P2 拖入當啓動時
將廣播群組設爲10拖入當啓動時
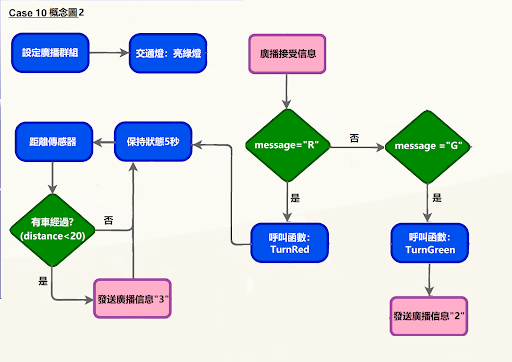
控制交通燈亮綠燈
暫停5秒
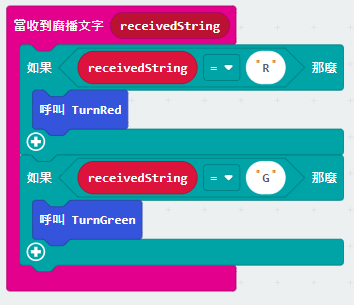
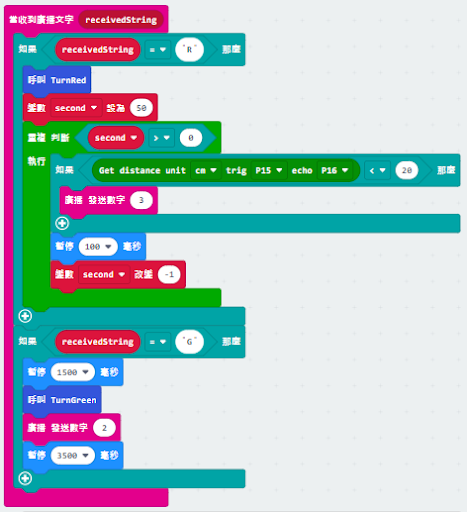
11.6.12. 通過接收不同數字來控制交通燈及車輛¶
將如果語句放入當收到廣播數字 receivedString
設receivedString=”R”,並呼叫TurnRed
S設receivedString=”G”,並呼叫TurnGreen

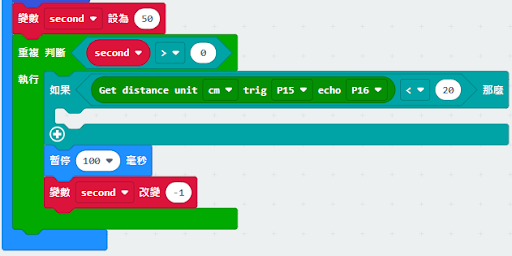
11.6.14. 獲得距離數值並控制車輛¶
將get distance unit cm trig P15 echo P16 < 20的如果句式拖入循環中
將廣播發送數字1拖入 if 句式
將廣播發送數字0拖到TurnGreen後
Full solution:
https://makecode.microbit.org/_fudKTM57XTKA
11.6.15. Car 1:¶
11.6.17. 通過接收不同數字來控制車輛¶
將如果語句放入當收到廣播數字 receivedNumber
設receivedNumber =1,並控制刹車。
設receivedNumber=0,並讓車向前移動。

Full solution:
https://makecode.microbit.org/_1o1iRhg3qfRF
11.6.18. Car 2:¶
11.6.20. 通過接收不同數字來控制車輛¶
將如果語句放入當收到廣播數字 receivedNumber
設receivedNumber =3,並控制刹車。
設receivedNumber=2,並讓車向前移動。

Full solution:
https://makecode.microbit.org/_YmH3PrRA14pC
11.7. 總結¶
距離傳感器可用作感應是否有車輛經過。如果有,它會向有關方向的車輛發送信息,要求他們刹車。